This section describes a large part of the SpacePlane model simulation that has been used as an example in this manual.
This simulation derived from an experiment implemented on the Human-Machine Systems lab of the Control and Simulation Division, Faculty of Aerospace Engineering The simulation model of the equations of motion of the spaceplane, including the control augmentation system, was programmed in one Simulink model. Using the Real-Time Workshop (RTW) toolbox, C code was generated for this Simulink model. Input of the RTW code are the pitch and roll stick inputs, and the output of the code is an output vector with all spaceplane motions.
The simulation was controlled with a control loaded side stick. This stick uses a hydraulic servo motor to simulate mechanical properties, in this case the mechanical properties of a passive (mass, spring and damper) stick.
Instrument display was done on a PC with a fast graphics card. The display is drawn using the output of the RTW model.
In addition to the display output, output to file was needed. The stick force and position data, and the spaceplane model output data, were recorded at a 50 Hz rate. Output to the control position of the experiment leader was also needed, during the run some key variables were shown in a window at the experiment leader's position, and key variables at certain points in the experiment (points along the pre-defined trajectory) were also shown and recorded. In this way it was for example possible to see the sink rate at touch down directly after a run.
example_flow
Data Flow diagram
Modules (or Blocks)
The first step in designing the simulation is setting up a (DUECA) data flow diagram. This diagram defines the modules used in the simulation, and the data (types) they send to each other.
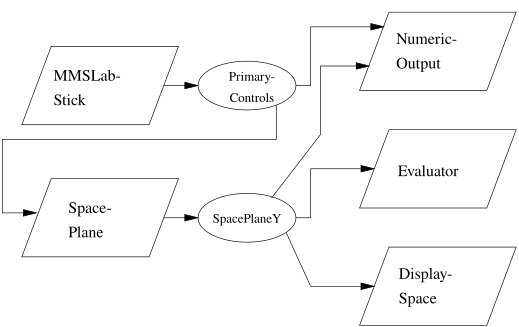
The data flow diagram contains the following blocks:
-
A module MMSLabStick, which reads the input force on the stick (i.e. directly from hardware), calculates the dynamics of the stick simulation, outputs the result of this calculation to the stick (to hardware), and also sends out stick position and force over a channel.
-
A module SpacePlane, which reads the stick input (position), feeds that to the RTW model, makes an update of the model, and sends out the output vector of the model over a channel.
-
A module DisplaySpace, which reads the spaceplane output vector, and draws the instrument display.
-
A module NumericOutput, which reads the spaceplane output vector the stick position and force data, and prints these to a file.
- A module Evaluator, which reads the spaceplane output vector, calculates the deviation from the nominal path and presents this and a few other key variables in a window.
These are all the modules that are needed from a model point-of-view. One other module is added for practical reasons. As will be explained in the following, the stick control loading and the spaceplane model run on different computers. The control loading has to run at a high update rate (2000 Hz), and it also produces data at 2000 Hz. The spaceplane model runs slower (50 Hz), and thus it needs every 40th output of the control loading model. Now, without modifications, DUECA would send the stick data at 2000 Hz to the other computers, where only 1/40 th of this data would be used. An additional routine, called RateReduction, which runs in the computer with the stick module, reads the stick data and writes with only 50 Hz.
Data types communicated over channels
The following model-related data types were communicated over the channels:
- PrimaryControls, a class that contains all data from the side stick.
- SpacePlaneY, the output vector of the space plane.
- DisplaySelect, the selected display.
Here is the file input for the code generator:
(Type double)
(EventAndStream PrimaryControls
(double stick_roll )
(double stick_pitch )
(double roll_moment)
(double pitch_moment)
(double roll_rate)
(double pitch_rate))
(EventAndStream SpacePlaneY
(double Y 29 ))
(Type int )
(Event DisplaySelect
(int type ))
Header and implementation files
Here are all header and implementation files for the modules.
-
First the stick input:
/* ------------------------------------------------------------------ *//* item : MMSLabStick.hxxmade by : Rene' van Paassendate : 001027category : header filedescription :changes : 001027 first versionlanguage : C++copyright : (c) 2016 TUDelft-AE-C&Scopyright : (c) 2022 René van Paassenlicense : EUPL-1.2WARNING : This example has not been updated to currentDUECA interfacing specifications*/#ifndef MMSLabStick_hh#define MMSLabStick_hh#ifdef MMSLabStick_cc#endif#include <SimulationModule.hxx>#include <StreamAccessToken.hxx>#include <PrimaryControls.hxx>class PassiveManipulator;class ParameterTable;class MMSLabStick: public SimulationModule{// definition of the stick roll propertiesdouble roll_mass, roll_damping,roll_spring_left, roll_spring_middle, roll_spring_right,roll_breakout, roll_friction, roll_stiction,roll_x_min, roll_x_trans_lower, roll_x_neutral,roll_x_trans_upper, roll_x_max,roll_output_k_force, roll_output_k_pos, roll_output_offset;// definition of the stick pitch propertiesdouble pitch_mass, pitch_damping,pitch_spring_aft, pitch_spring_middle, pitch_spring_forward,pitch_breakout, pitch_friction, pitch_stiction,pitch_x_min, pitch_x_trans_lower, pitch_x_neutral,pitch_x_trans_upper, pitch_x_max,pitch_output_k_force, pitch_output_k_pos, pitch_output_offset;// definition of generic propertiesdouble dt, stick_arm;bool kickstart_io;// two systems, roll and pitch channelPassiveManipulator *roll, *pitch;// scale factors for the inputstatic const double i_scale[6], i_offset[6];static const double o_scale[3], o_offset[3];// input force checkint force_check_count;double fcheck[2];// output channels for the controls, and inco output channelStreamChannelWriteToken<PrimaryControls> controls;EventChannelWriteToken<PrimaryControls> i_controls;// activityCallback<MMSLabStick> cb1, cb2;ActivityCallback measure_control;ActivityCallback calculate_inco;public:const static ParameterTable* getMyParameterTable();static const char* const classname;static const IncoTable* getMyIncoTable();/// constructor, should be called from scheme, via the ModuleCreatorMMSLabStick(Entity* e, const char* part, const PrioritySpec& ts);/// destructor~MMSLabStick();/// further specification, update ratebool setTiming(const TimeSpec& t);public:/// start responsiveness to input datavoid startModule(const TimeSpec &time);/// stop responsiveness to input datavoid stopModule(const TimeSpec &time);/// check sanity of all data and report ok or notbool isPrepared();private:/// the method that implements the main calculationvoid doStep(const TimeSpec& ts);/** performs an inco calculation. Should NOT use current stateuses event channels parallel to the stream data channels,calculates based on the event channel input, the steady stateoutput. */void doIncoCalculation(const TimeSpec& ts);/// snapshot capability, sendingSnapshot* sendSnapshot(const TimeSpec& t, bool inco);/// restoring state from snapshotvoid loadSnapshot(const Snapshot* );};#endif/* ------------------------------------------------------------------ *//* item : MMSLabStick.cxxmade by : Rene' van Paassendate : 001027category : body filedescription :changes : 001027 first versionlanguage : C++copyright : (c) 2016 TUDelft-AE-C&Scopyright : (c) 2022 René van Paassenlicense : EUPL-1.2WARNING : This example has not been updated to currentDUECA interfacing specifications*/#define MMSLabStick_cc#include "MMSLabStick.hxx"#include "PassiveManipulator.hxx"#include <Ticker.hxx>#include <IncoTable.hxx>#include <ParameterTable.hxx>extern "C" {#include "natmio.h"#include "dda-06.h"}#include "config.h"#define DO_INSTANTIATE#include <TypeCreator.hxx>#include <VarProbe.hxx>#include <MemberCall.hxx>#include <Callback.hxx>#include <StreamAccessToken.hxx>#include <EventAccessToken.hxx>#include <Event.hxx>//#define SKIP_STICK_IOconst char* const MMSLabStick::classname = "mmslab-stick";// input scale factors// for roll and pitch, assuming that these were scaled to give 100N/10V// for roll and 81.33N/10V for pitch// These gains give the moment. (100N * 0.09)// A/D scale has been set to 5V, so gains must be multiplied by 0.5const double MMSLabStick::i_scale[6] = {-0.00458 * 0.5, // roll [Nm/-]-8.784e-4, // roll [rad/-]-0.00366 * 0.5, // pitch [Nm/-]6.608e-4, // pitch [rad/-]0.0, 0.0};const double MMSLabStick::i_offset[6] ={41.0,-2.958e-3, //roll [rad]48.0,4.503e-4, //pitch [rad]0.0,0.0};//const double MMSLabStick::o_scale[3] = {-4228.0*3.3, // roll [-/rad]// 5402.0*3.3, // pitch [-/rad]// 0.0}; // yawconst double DEG_RAD = 3.1415927/180.0;// this gain has been guessed. Adri adjusted input gain for stick with// factor 1/3.3 Above (commented out) calculation gives unrealistic values,// with outputs way over 2000 for max roll/pitch position (30, 20 deg resp,// converted to radians. A quick test revealed a digital output value of// 1900 is close to max excursion for both roll and pitch. this has been// implemented below.const double MMSLabStick::o_scale[3] = {-1900.0/(30.0*DEG_RAD), // roll [-/rad]1900.0/(20.0*DEG_RAD), // pitch [-/rad]0.0}; // yawconst double MMSLabStick::o_offset[3] = {0.0, 0.0, 0.0};const IncoTable* MMSLabStick::getMyIncoTable(){static const IncoTable my_inco_table[] ={{(new IncoVariable("stick pitch trim", -1.0, 1.0))->forMode(FlightPath, Control),new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_output_offset) },{ NULL, NULL}};return my_inco_table;}MMSLabStick::MMSLabStick(Entity* e,const char* part,const PrioritySpec& ps) :SimulationModule(e, classname, part, getMyIncoTable()),// default stick roll propertiesroll_mass(2.0),roll_damping(30.0),roll_spring_left(400.0),roll_spring_middle(400.0),roll_spring_right(400.0),roll_breakout(0.0),roll_friction(0.0),roll_stiction(0.0),roll_x_min(-25.0),roll_x_trans_lower(-25.0),roll_x_neutral(0.0),roll_x_trans_upper(25.0),roll_x_max(25.0),roll_output_k_force(0.0),roll_output_k_pos(1.0),roll_output_offset(0.0),// default stick pitch propertiespitch_mass(2.0),pitch_damping(30.0),pitch_spring_aft(400.0),pitch_spring_middle(400.0),pitch_spring_forward(400.0),pitch_breakout(0.0),pitch_friction(0.0),pitch_stiction(0.0),pitch_x_min(-19.0),pitch_x_trans_lower(-19.0),pitch_x_neutral(0.0),pitch_x_trans_upper(19.0),pitch_x_max(19.0),pitch_output_k_force(0.0),pitch_output_k_pos(1.0),pitch_output_offset(0.0),// generic simulation propertiesdt(Ticker::single()->getDT()),stick_arm(0.09),kickstart_io(false),// the actual systemsroll(NULL), pitch(NULL),// output channelscontrols(getId(), NameSet(getEntity(), "PrimaryControls", part)),// NOTE: inco output with part = "" is a hack, depending on a rate// reductor that reduces/interfaces the controls channel, and direct// communication of the inco channel.i_controls(getId(), NameSet(getEntity(), "inco_PrimaryControls", "")),// callback functions and activitiescb1(this, &MMSLabStick::doStep),cb2(this, &MMSLabStick::doIncoCalculation),measure_control(getId(), "control input", &cb1, ps),calculate_inco(getId(), "inco", &cb2, PrioritySpec(0, 0)){measure_control.setTrigger(*Ticker::single());calculate_inco.setTrigger(t_inco_input);calculate_inco.switchOn(TimeSpec(0,0));// initialise boardint status = Init_AT_MIO();if (status != 0) {cerr << "Cannot init AT_MIO" << endl;}// so set-up with my preferencesSetup_AT_MIO();// zero the dda outputsfor (int ii = 6; ii--; )outputVolt(ii, 0.0);}MMSLabStick::~MMSLabStick(){//}bool MMSLabStick::isPrepared(){// checksif (roll_mass < 0.5 || roll_damping < 0.0 ||roll_spring_left < 0.0 || roll_spring_middle < 0.0 ||roll_spring_right < 0.0 || roll_x_min > roll_x_neutral ||roll_x_neutral > roll_x_max ||roll_x_trans_upper < roll_x_trans_lower) {cerr << getId() << "Error in roll parameters" << endl;return false;}if (pitch_mass < 0.5 || pitch_damping < 0.0 ||pitch_spring_aft < 0.0 || pitch_spring_middle < 0.0 ||pitch_spring_forward < 0.0 || pitch_x_min > pitch_x_neutral ||pitch_x_neutral > pitch_x_max ||pitch_x_trans_upper < pitch_x_trans_lower) {cerr << getId() << "Error in pitch parameters" << endl;return false;}if (!controls.isValid()) {return false;}// just to make sureif (pitch != NULL) return true;// make a pitch stick systemif (pitch != NULL) delete(pitch);// note: forward is positivepitch = new PassiveManipulator(stick_arm, pitch_mass, pitch_damping,pitch_spring_aft, pitch_spring_middle, pitch_spring_forward,pitch_breakout, pitch_friction, pitch_stiction,pitch_x_min, pitch_x_trans_lower, pitch_x_neutral,pitch_x_trans_upper, pitch_x_max,pitch_output_k_force, pitch_output_k_pos, pitch_output_offset, dt);// note: left is positive, biggerif (roll != NULL) delete(roll);roll = new PassiveManipulator(stick_arm, roll_mass, roll_damping,roll_spring_right, roll_spring_middle, roll_spring_left,roll_breakout, roll_friction, roll_stiction,roll_x_min, roll_x_trans_lower, roll_x_neutral,roll_x_trans_upper, roll_x_max,roll_output_k_force, roll_output_k_pos, roll_output_offset, dt);// preparedreturn true;}bool MMSLabStick::setTiming(const TimeSpec& ts){measure_control.setTimeSpec(ts);dt = Ticker::single()->getDT()*ts.getValiditySpan();return true;}void MMSLabStick::startModule(const TimeSpec &time){measure_control.switchOn(time);#ifdef STICK_ASYNC_IOkickstart_io = true;#endif}void MMSLabStick::stopModule(const TimeSpec &time){measure_control.switchOff(time);}void MMSLabStick::doIncoCalculation(const TimeSpec& ts){// there is only one modeassert(getIncoMode() == FlightPath);// only thing to do is to send the inco outputi_controls.sendEvent(new PrimaryControls(0.0, pitch_output_offset, 0.0, 0.0, 0.0, 0.0), ts);}void MMSLabStick::doStep(const TimeSpec& ts){double roll_moment, roll_pos, pitch_moment, pitch_pos;// measure the input, start a single aquisition and wait#ifdef STICK_ASYNC_IOif (kickstart_io) {kickstart_io = false;Clear_FIFO();AI_Start_The_Acquisition();}#elif !defined(SKIP_STICK_IO)AI_Start_The_Acquisition();#endif#ifdef SKIP_STICK_IOroll_moment = 0.0;roll_pos = 0.0;pitch_moment =0.0;pitch_pos = 0.0;#elseWait_AT_MIO();int16_t tmp = Board_Read(ADC_FIFO_Data_Register) & 0xffff;roll_moment = (tmp +i_offset[0]) * i_scale[0];Wait_AT_MIO();tmp = Board_Read(ADC_FIFO_Data_Register) & 0xffff;roll_pos = tmp * i_scale[1] + i_offset[1];Wait_AT_MIO();tmp = Board_Read(ADC_FIFO_Data_Register) & 0xffff;pitch_moment = (tmp +i_offset[2]) * i_scale[2];Wait_AT_MIO();tmp = Board_Read(ADC_FIFO_Data_Register) & 0xffff;pitch_pos = tmp * i_scale[3] + i_offset[3];#endif#ifdef STICK_ASYNC_IO// starts the acquisition for the NEXT cycle. In this way we don't wait// for the conversionAI_Start_The_Acquisition();#endifswitch (getAndCheckState(ts)) {case HoldCurrent:// simple trick. use 0 input on the system. Without much friction,// it will more or less return to the middle positionpitch->doStep(0.0);roll->doStep(0.0);break;case Advance:// do the simulationpitch->doStep(pitch_moment); //*stick_arm);roll->doStep(roll_moment); //*stick_arm);}// output back to the stickint16_t out0 =int16_t(rint(pitch->getState()[0] * o_scale[0] + o_offset[0]));if (out0 > 2047) out0 = 2047;if (out0 < -2048) out0 = -2048;int16_t out1 =int16_t(rint(roll->getState()[0] * o_scale[1] + o_offset[1]));if (out1 > 2047) out1 = 2047;if (out1 < -2048) out1 = -2048;Board_Write(AO_DAC_0_Data_Register, out0);Board_Write(AO_DAC_1_Data_Register, out1);// send to the rest of the simulationPrimaryControls *c;controls.getAccess(c, ts);c->stick_roll = roll->getOutput()[0];c->stick_pitch = pitch->getOutput()[0];c->roll_moment = roll_moment;c->pitch_moment= pitch_moment;c->roll_rate = roll_pos;c->pitch_rate = pitch_pos;controls.releaseAccess(c);}Snapshot* MMSLabStick::sendSnapshot(const TimeSpec& ts, bool inco){// the snapshot contains the time, and the initial pitch inputAmorphStore s(new char[16], 16);if (inco) {packData(s, double(0.0)); // roll pospackData(s, double(0.0)); // roll velpackData(s, double(0.0)); // pitch pospackData(s, double(0.0)); // pitch vel// packData(s, i_pitch_output_offset); // trim}else {packData(s, double(0.0)); // roll pospackData(s, double(0.0)); // roll velpackData(s, double(0.0)); // pitch pospackData(s, double(0.0)); // pitch vel// packData(s, pitch_output_offset); // trim}return new Snapshot(s.getToData(), s.getSize(), getNameSet());}void MMSLabStick::loadSnapshot(const Snapshot* d){AmorphReStore s(d->data, d->data_size);// unPackData(s, t);// unPackData(s, u0_y);}const ParameterTable* MMSLabStick::getMyParameterTable(){static const ParameterTable table[] = {{ "set-timing", new MemberCall<MMSLabStick,TimeSpec>(&MMSLabStick::setTiming)},{ "roll-mass", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_mass) },{ "roll-damping", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_damping) },{ "roll-spring-left", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_spring_left) },{ "roll-spring-middle", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_spring_middle) },{ "roll-spring-right", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_spring_right) },{ "roll-breakout", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_breakout) },{ "roll-friction", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_friction) },{ "roll-stiction", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_stiction) },{ "roll-x-min", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_x_min) },{ "roll-x-trans-lower", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_x_trans_lower) },{ "roll-x-neutral", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_x_neutral) },{ "roll-x-trans-upper", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_x_trans_upper) },{ "roll-x-max", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_x_max) },{ "roll-output-k-force", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_output_k_force) },{ "roll-output-k-pos", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_output_k_pos) },{ "roll-output-offset", new VarProbe<MMSLabStick,double>(&MMSLabStick::roll_output_offset) },{ "pitch-mass", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_mass) },{ "pitch-damping", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_damping) },{ "pitch-spring-aft", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_spring_aft) },{ "pitch-spring-middle", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_spring_middle) },{ "pitch-spring-forward", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_spring_forward) },{ "pitch-breakout", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_breakout) },{ "pitch-friction", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_friction) },{ "pitch-stiction", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_stiction) },{ "pitch-x-min", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_x_min) },{ "pitch-x-trans-lower", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_x_trans_lower) },{ "pitch-x-neutral", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_x_neutral) },{ "pitch-x-trans-upper", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_x_trans_upper) },{ "pitch-x-max", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_x_max) },{ "pitch-output-k-force", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_output_k_force) },{ "pitch-output-k-pos", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_output_k_pos) },{ "pitch-output-offset", new VarProbe<MMSLabStick,double>(&MMSLabStick::pitch_output_offset) },{ "stick-arm", new VarProbe<MMSLabStick,double>(&MMSLabStick::stick_arm) },{NULL, NULL}};return table;}static TypeCreator<MMSLabStick> a(MMSLabStick::getMyParameterTable());These files use an auxiliary class PassiveStick, which is not included in this manual. Since the HardwareModule class is not complete yet, this uses the SimulationModule class.
-
The rate reduction class, which simply reads in the stick input and writes it back again. By specifying an update rate for its activity, it assures itself of reading only at the proper times, and writing with the proper TimeSpec.
/* ------------------------------------------------------------------ *//* item : RateReduction.hxxmade by : Rene' van Paassendate : 001027category : header filedescription :changes : 001027 first versionlanguage : C++copyright : (c) 2016 TUDelft-AE-C&Scopyright : (c) 2022 René van Paassenlicense : EUPL-1.2WARNING : This example has not been updated to currentDUECA interfacing specifications*/#ifndef RateReduction_hh#define RateReduction_hh#ifdef RateReduction_cc#endif#include <dueca.h>#include <PrimaryControls.hxx>class PassiveManipulator;class ParameterTable;class RateReduction: public Module{// output channels for the controls, and inco output channelStreamChannelWriteToken<PrimaryControls> controls_out;StreamChannelReadToken<PrimaryControls> controls_in;// activityCallback<RateReduction> cb1;ActivityCallback reduce_rate;public:const static ParameterTable* getMyParameterTable();static const char* const classname;/// constructor, should be called from scheme, via the ModuleCreatorRateReduction(Entity* e, const char* part, const PrioritySpec& ts);/// destructor~RateReduction();/// further specification, update ratebool setTiming(const TimeSpec& t);public:/// start responsiveness to input datavoid startModule(const TimeSpec &time);/// stop responsiveness to input datavoid stopModule(const TimeSpec &time);/// check sanity of all data and report ok or notbool isPrepared();private:/// the method that implements the main calculationvoid doStep(const TimeSpec& ts);};#endif/* ------------------------------------------------------------------ *//* item : RateReduction.cxxmade by : Rene' van Paassendate : 001027category : body filedescription :changes : 001027 first versionlanguage : C++copyright : (c) 2016 TUDelft-AE-C&Scopyright : (c) 2022 René van Paassenlicense : EUPL-1.2WARNING : This example has not been updated to currentDUECA interfacing specifications*/#define RateReduction_cc#include "RateReduction.hxx"#include <Ticker.hxx>extern "C" {#include "natmio.h"}#include "config.h"#define DO_INSTANTIATE#include <dueca.h>const char* const RateReduction::classname = "rate-reduction";RateReduction::RateReduction(Entity* e,const char* part,const PrioritySpec& ps) :Module(e, classname, part),// output channelscontrols_out(getId(), NameSet(getEntity(), "PrimaryControls", part)),controls_in(getId(), NameSet(getEntity(), "PrimaryControls", "stick")),// callback functions and activitiescb1(this, &RateReduction::doStep),reduce_rate(getId(), "control input", &cb1, ps){reduce_rate.setTrigger(controls_in);}RateReduction::~RateReduction(){//}bool RateReduction::isPrepared(){return controls_in.isValid() && controls_out.isValid();}bool RateReduction::setTiming(const TimeSpec& ts){reduce_rate.setTimeSpec(ts);return true;}void RateReduction::startModule(const TimeSpec &time){reduce_rate.switchOn(time);}void RateReduction::stopModule(const TimeSpec &time){reduce_rate.switchOff(time);}void RateReduction::doStep(const TimeSpec& ts){// measure the input, copy to the outputconst PrimaryControls *in; controls_in.getAccess(in, ts);PrimaryControls *out; controls_out.getAccess(out, ts);out->stick_roll = in->stick_roll;out->stick_pitch = in->stick_pitch;out->roll_moment = in->roll_moment;out->pitch_moment= in->pitch_moment;out->roll_rate = in->roll_rate;out->pitch_rate = in->pitch_rate;controls_in.releaseAccess(in);controls_out.releaseAccess(out);}const ParameterTable* RateReduction::getMyParameterTable(){static const ParameterTable table[] = {{ "set-timing", new MemberCall<RateReduction,TimeSpec>(&RateReduction::setTiming)},{NULL, NULL}};return table;}static TypeCreator<RateReduction> a(RateReduction::getMyParameterTable()); -
The space plane module.
/* ------------------------------------------------------------------ *//* item : SpacePlane.hxxmade by : Rene' van Paassendate : 001003category : header filedescription :changes : 001003 first versionlanguage : C++copyright : (c) 2016 TUDelft-AE-C&Scopyright : (c) 2022 René van Paassenlicense : EUPL-1.2*/#ifndef SpacePlane_hh#define SpacePlane_hh#ifdef SpacePlane_cc#endif// include the dusime header#include <dusime.h>// include headers for the objects that are sent over the channels#include "PrimaryControls.hxx"#include "SpacePlaneY.hxx"#include "SpacePlaneState.hxx"// include headers for functions/classes you need in the module// This module is based on code generated with real-time workshop from// a SimuLink model. Therefore we include the simstruc and the// simulink model, called "complete"extern "C" {#define RT#define RTW_GENERATED_S_FUNCTION#include "simstruc.h"#include "complete.h"}/** e01 *//* Provides a class that implements Crew Rescue Vehicle dynamics.Implements the dynamics of a Crew Rescue Vehicle with low L/Dcharacteristics. The dynamic model is created in SimuLink andexported with Real-Time Workshop. The module encapsulates the Csource with the Simulink Model. Inputs are the control vector,outputs contain most of the state and instrument related data. */class SpacePlane: public SimulationModule{/** e02 */private: // Simulation data/* Simulink system variable pointers, normal, one for inco. Thesealso contain the state data. */SimStruct *S; /* *i_S */// prediction timeint t_predict;// stop heightdouble z_stop;private: // trim calculation data// trim calculation is not implemented yet.private: // snapshot data// snapshot statereal_T s_x[NSTATES];private: // channel access// input and output channels for the normal runningStreamChannelReadToken<PrimaryControls> controls;StreamChannelWriteToken<SpacePlaneY> output;StreamChannelWriteToken<SpacePlaneState> state;private: // activity allocation// Callback object for simulation calculationCallback<SpacePlane> cb1;// Activity for simulation calculationActivityCallback do_calc;public: // class name and trim/parameter tables// Name of the module.static const char* const classname;// Return the initial condition tablestatic const IncoTable* getMyIncoTable();// Return the parameter tablestatic const ParameterTable* getMyParameterTable();public: // construction and further specification/* Constructor. Is normally called from scheme/the creation script. */SpacePlane(Entity* e, const char* part, const PrioritySpec& ts);/* Continued construction. This is called after all scriptparameters have been read and filled in, according to theparameter table. Your running environment, e.g. for OpenGLdrawing, is also prepared. Any lengty initialisations (likereading the 4 GB of wind tables) should be done here.Return false if something in the parameters is wrong (bythe way, it would help if you printed what!) May be deleted. */bool complete();/* Destructor. */~SpacePlane();// add here the member functions you want to be called with further// parameters. These are then also added in the parameter table// The most common one (addition of time spec) is given here.// Delete if not needed!/** s01 *//* Specify a time specification for the simulation activity. */bool setTimeSpec(const TimeSpec& ts);/* Request check on the timing. */bool checkTiming(const vector<int>& i);public: // member functions for cooperation with DUECA// indicate that everything is readybool isPrepared();// start responsiveness to input datavoid startModule(const TimeSpec &time);// stop responsiveness to input datavoid stopModule(const TimeSpec &time);/** s03 */public: // the member functions that are called for activities// the method that implements the main calculationvoid doCalculation(const TimeSpec& ts);public: // member functions for cooperation with DUSIME// For the Snapshot capability, fill the snapshot "snap" with the// data saved at a point in your simulation (if from_trim is false)// or with the state data calculated in the trim calculation (if// from_trim is true)void fillSnapshot(const TimeSpec& ts,Snapshot& snap, bool from_trim);// Restoring the state of the simulation from a snapshotvoid loadSnapshot(const TimeSpec& t, const Snapshot& snap);/* Perform a trim calculation. Should NOT use current stateuses event channels parallel to the stream data channels,calculates, based on the event channel input, the steady stateoutput. */// this has not been implemented in DUECA, so we comment it out// void trimCalculation(const TimeSpec& ts, const IncoMode& mode);};#endif/* ------------------------------------------------------------------ *//* item : SpacePlane.cxxmade by : Rene' van Paassendate : 001003category : body filedescription :changes : 001003 first versionlanguage : C++copyright : (c) 2016 TUDelft-AE-C&Scopyright : (c) 2022 René van Paassenlicense : EUPL-1.2*/#define SpacePlane_cxx// include the definition of the module class#include "SpacePlane.hxx"// include additional files needed for your calculation here#include "StatesOutputs.hxx"#define D_MOD#define E_MOD#include <debug.h>extern "C" {// here we include the file with (static) routines for the RTW/Simulink model#define RTW_MODEL complete_reg#include "complete.c"#include "rtw_prototypes.h"}// the standard package for DUSIME, including template source#define DO_INSTANTIATE#include <dusime.h>// define conversion factor to degreesconst double RAD_DEG = 180.0 / 3.1415926535897931E+000;// class/module nameconst char* const SpacePlane::classname = "space-plane";// initial condition/trim table// this does not work yet, so the table is emptyconst IncoTable* SpacePlane::getMyIncoTable(){static IncoTable inco_table[] = {// enter pairs of IncoVariable and VarProbe pointers (i.e.// objects made with new), in this table.// For example// {(new IncoVariable("example", 0.0, 1.0, 0.01))// ->forMode(FlightPath, Constraint)// ->forMode(Speed, Control),// new VarProbe<SpacePlane,double>// (REF_MEMBER(&SpacePlane::i_example))}// always close off with:{ NULL, NULL} };return inco_table;}// parameters to be insertedconst ParameterTable* SpacePlane::getMyParameterTable(){static const ParameterTable parameter_table[] = {{ "set-timing",new MemberCall<SpacePlane,TimeSpec>(&SpacePlane::setTimeSpec)},{ "set-stop-height",new VarProbe<SpacePlane,double>(REF_MEMBER(&SpacePlane::z_stop))},{ "check-timing",new MemberCall<SpacePlane,vector<int> >(&SpacePlane::checkTiming)},// always close off with:{ NULL, NULL} };return parameter_table;}/** e06 */// constructorSpacePlane::SpacePlane(Entity* e, const char* part, constPrioritySpec& ps) :/* The following line initialises the SimulationModule base class.You always pass the pointer to the entity, give the classname and thepart arguments.If you give a NULL pointer instead of the inco table, you will not becalled for trim condition calculations, which is normal if you forexample implement logging or a display.If you give 0 for the snapshot state, you will not be called tofill a snapshot, or to restore your state from a snapshot. Onlyapplicable if you have no state. */SimulationModule(e, classname, part, getMyIncoTable(),NSTATES*sizeof(real_T)),// initialize the data you need in your simulationS(NULL),z_stop(0.0),// initialize the data you need for the trim calculation// initialize the channel access tokenscontrols(getId(), NameSet(getEntity(), "PrimaryControls", part)),output(getId(), NameSet(getEntity(), "SpacePlaneY", part)),state(getId(), NameSet(getEntity(), "SpacePlaneState", part), 21),// activity initializationcb1(this, &SpacePlane::doCalculation),do_calc(getId(), "simulation step", &cb1, ps){// for a simulink model, you need to initialise infinity, - inf and// Not-a-number.rt_InitInfAndNaN(sizeof(real_T));// create a SimuLink/rtw modelS = RTW_MODEL ();// initialize itMdlInitializeSizes(S);MdlInitializeSampleTimes(S);rt_CreateIntegrationData(S);const char* ret;if ((ret = rt_InitTimingEngine(S)) != NULL) {E_MOD(getId() << ' ' << ret);}MdlStart(S);// set the initial timessSetT(S, 0.0);// and also calculate the initial stateMdlUpdate(S, 0);/** e00 */// specify that the control input is the trigger for the calculationdo_calc.setTrigger(controls);// just a check on the states defined and the modelassert(X_no_states == NSTATES);assert(Y_no_outputs == NOUTPUTS);}/** e01 */bool SpacePlane::complete(){/* All your parameters have been set. You may do extendedinitialisation here. Return false if something is wrong. */return true;}/** e02 */// destructorSpacePlane::~SpacePlane(){// delete the modelMdlTerminate(S);}/** e03 *//** s02 */// the setTimeSpec functionbool SpacePlane::setTimeSpec(const TimeSpec& ts){// a time span of 0 is not acceptableif (ts.getValiditySpan() == 0) return false;// specify the timespec to the activitydo_calc.setTimeSpec(ts);// do whatever else you need to process this in your model// hint: ts.getDtInSeconds()// in this case, the Simulink model has to be told of the time basessSetStepSize(S, ts.getDtInSeconds());// return true if everything is acceptablereturn true;}/** e04 */// and the checkTiming functionbool SpacePlane::checkTiming(const vector<int>& i){if (i.size() == 3) {new TimingCheck(do_calc, i[0], i[1], i[2]);}else if (i.size() == 2) {new TimingCheck(do_calc, i[0], i[1]);}else {return false;}return true;}/** e05 */// tell DUECA you are preparedbool SpacePlane::isPrepared(){// assume I am ready if all tokens are validreturn controls.isValid() && output.isValid();}// start the modulevoid SpacePlane::startModule(const TimeSpec &time){do_calc.switchOn(time);}// stop the modulevoid SpacePlane::stopModule(const TimeSpec &time){do_calc.switchOff(time);}/** e07 */// fill a snapshot with state data. You may remove this method (and the// declaration) if you specified to the SimulationModule that the size of// state snapshots is zerovoid SpacePlane::fillSnapshot(const TimeSpec& ts,Snapshot& snap, bool from_trim){// The most efficient way of filling a snapshot is with an AmorphStore// object.AmorphStore s(snap.accessData(), snap.getDataSize());if (from_trim) {// not implemented}else {// this is a snapshot from the running simulation. Dusime takes care// that no other snapshot is taken at the same time, so you can safely// pack the data you copied into (or left into) the snapshot state// variables in here// use packData(s, snapshot_state_variable1); ...for (int ii = 0; ii < NSTATES; ii++) {packData(s, s_x[ii]);}}}// reload from a snapshot. You may remove this method (and the// declaration) if you specified to the SimulationModule that the size of// state snapshots is zerovoid SpacePlane::loadSnapshot(const TimeSpec& ts, const Snapshot& snap){// access the data in the snapshot with an AmorphReStore objectAmorphReStore store(snap.data, snap.data_size);D_MOD(getId() << " loading snapshot");// copy the state data into the state vectorreal_T* X = ssGetX(S);double t;for (int ii = 0; ii < NSTATES; ii++ ) {unPackData(store, t);X[ii] = t;}}/** s07 */void SpacePlane::doCalculation(const TimeSpec& ts){// check the state we are supposed to be inswitch (getAndCheckState(t)) {case SimulationState::HoldCurrent: {// only repeat the output, don not change the model stateStreamWriter<SpacePlaneY> y(output, ts);real_T* Y = ssGetY(S);for (int ii = NOUTPUTS; ii--; ) {y.data().Y[ii] = Y[ii];}// send out the state alsoStreamWriter<SpacePlaneState> x(state, ts);real_T *X = ssGetX(S);for (int ii = NSTATES; ii--; ) {x.data().X[ii] = X[ii];}}break;/** e08a */case SimulationState::Replay:case SimulationState::Advance: {// access the inputStreamReader<PrimaryControls> u(controls, ts);// copy the input to the simulink inputdouble* U = ssGetU(S);U[0] = u.data().stick_pitch * RAD_DEG * 0.05;U[1] = u.data().stick_roll * RAD_DEG;// calculate the output/update the normal modelfor (int ii = 0; ii < NSAMPLE_TIMES; ii++)MdlOutputs(S, ii);// at this point, the output should be taken// so request access to the output channelStreamWriter<SpacePlaneY> y(output, ts);real_T* Y = ssGetY(S);for (int ii = NOUTPUTS; ii--; ) {y.data().Y[ii] = Y[ii];}/** s08a */// only do a model update if the height is above the stop height// below the stop height the thing will be frozenif (Y[Y_z] > z_stop) {// discrete update of the model,for (int ii = 0; ii < NSAMPLE_TIMES; ii++)MdlUpdate(S, ii);// specify the end time of the integration stepssSetSolverStopTime(S, ssGetT(S) + ssGetStepSize(S));// and do a continuous time steprt_UpdateContinuousStates(S);// and check for discrete time jumpsrt_UpdateDiscreteTaskSampleHits(S);}// send out the state alsoStreamWriter<SpacePlaneState> x(state, ts);real_T *X = ssGetX(S);for (int ii = NSTATES; ii--; ) {x.data().X[ii] = X[ii];}}break;default:// other states should never be entered for a SimulationModule,// HardwareModules on the other hand have more states. Throw an// exception if we get here,throw CannotHandleState(getId(),GlobalId(), "state unhandled");}/** s08b */if (snapshotNow()) {// keep a copy of the model state. Snapshot sending is done in the// sendSnapshot routine, later, and possibly at lower priority// e.g.// snapshot_state_variable1 = state_variable1; ...// (or maybe if your state is very large, there is a cleverer way ...)real_T *X = ssGetX(S);for (int ii = NSTATES; ii--; )s_x[ii] = X[ii];}}/** e09 *//* the following is not implementedvoid SpacePlane::trimCalculation(const TimeSpec& ts, const TrimMode& mode)*//** s10 */// Make a TypeCreator object for this module, the TypeCreator// will check in with the scheme-interpreting code, and enable the// creation of modules of this typestatic TypeCreator<SpacePlane> a(SpacePlane::getMyParameterTable());Here macros for debugging/messaging are defined.This module's calculations are based on a model that was implemented in SimuLink and converted with Real-Time Workshop. For the conversion you should specify the "real time malloc" option, this will enable the code to start up several instances of the same model in one program. A script called "correctSimulink", which is installed with the DUECA program, makes some small corrections to the generated Simulink code. Run this once on the RTW files.
-
The numeric output module.
/* ------------------------------------------------------------------ *//* item : NumericPlaneOutput.hxxmade by : Rene' van Paassendate : 001004category : header filedescription :changes : 001004 first versionlanguage : C++copyright : (c) 2016 TUDelft-AE-C&Scopyright : (c) 2022 René van Paassenlicense : EUPL-1.2*/#ifndef NumericPlaneOutput_hh#define NumericPlaneOutput_hh#ifdef NumericPlaneOutput_cc#endif#include <dusime.h>#include <stringoptions.h>#include "SpacePlaneY.hxx"#include "PrimaryControls.hxx"#include "DisplaySelect.hxx"#include <fstream>#include <iostream>/** provides numeric output of a (space) plane output vector */class NumericPlaneOutput: public SimulationModule{ofstream out0, out1;vstring basename;int number;bool header_written;int display_plus_tunnel;public:StreamChannelReadToken<PrimaryControls> t_controls;StreamChannelReadToken<SpacePlaneY> t_output;EventChannelReadToken<DisplaySelect> t_display_type;Callback<NumericPlaneOutput> cb;ActivityCallback do_output;public:static const char* const classname;static const ParameterTable* getMyParameterTable();public:/// constructor, should be called from scheme, via the ModuleCreatorNumericPlaneOutput(Entity* e, const char* part, const PrioritySpec& ts);/// destructor~NumericPlaneOutput();/// further specification, output filebool setOutputFile(const vstring& f);public:/// start responsiveness to input datavoid startModule(const TimeSpec &time);/// stop responsiveness to input datavoid stopModule(const TimeSpec &time);bool isPrepared();void loadSnapshot(const TimeSpec& ts, const Snapshot& snap);private:/// check whether header has been written, and if needed, write onevoid checkHeader();/// actions to take when using a new output filevoid switchFiles();/// the method that implements the main calculationvoid doStep(const TimeSpec& ts);};#endif/* ------------------------------------------------------------------ *//* item : NumericPlaneOutput.cxxmade by : Rene' van Paassendate : 001004category : body filedescription :changes : 001004 first versionlanguage : C++copyright : (c) 2016 TUDelft-AE-C&Scopyright : (c) 2022 René van Paassenlicense : EUPL-1.2*/#define NumericPlaneOutput_cc#include "NumericPlaneOutput.hxx"extern "C" {#define RT#define RTW_GENERATED_S_FUNCTION#include "complete.h"}#include <sys/stat.h>#include <time.h>#include <unistd.h>#include <iomanip>#include <errno.h>#include <strstream>#define DO_INSTANTIATE#include <dusime.h>const char* const NumericPlaneOutput::classname = "numeric-plane-output";NumericPlaneOutput::NumericPlaneOutput(Entity* e,const char* part,const PrioritySpec& ps) :SimulationModule(e, classname, part, NULL),number(0),header_written(false),display_plus_tunnel(0),t_controls(getId(), NameSet(getEntity(), "PrimaryControls", part)),t_output(getId(), NameSet(getEntity(), "SpacePlaneY", part)),t_display_type(getId(), NameSet(getEntity(), "DisplaySelect", part)),cb(this, &NumericPlaneOutput::doStep),do_output(getId(), "numeric output", &cb, ps){out0.open("/dev/null");out1.open("/dev/null");do_output.setTrigger(t_output && t_controls);}NumericPlaneOutput::~NumericPlaneOutput(){//}static const char* fileName(vstring& basename, int no){static char buf[256];strstream s(buf, 256);s << basename << setw(4) << setfill('0') << no << ".m" << '\000';return buf;}static const char* fileNameData(vstring& basename, int no){static char buf[256];strstream s(buf, 256);s << basename << setw(4) << setfill('0') << no << ".dat" << '\000';return buf;}void NumericPlaneOutput::checkHeader(){if (header_written) return;time_t tim = time(NULL);out1 << "% Configuration data from a simulation session with the CRV\n"<< "% experiment date and time " << ctime(&tim)<< "\n%\n"<< "% Display configuration\ndisplay_conf="<< display_plus_tunnel / 3 + 1<< "\n\n% Tunnel/path no\ntunnel_no="<< display_plus_tunnel % 3 + 1<< endl;header_written = true;}void NumericPlaneOutput::switchFiles(){if (!header_written) {// make do with the present filecout << "Keeping output file " << fileName(basename, number)<< endl;}else {// close off the present fileout0 << endl; out0.close(); out1.close();// find an extension number that has not been used with this base namestruct stat buf;for (; number < 10000 &&stat(fileName(basename, number), &buf) != -1 &&stat(fileNameData(basename, number), &buf) != -1 &&errno != ENOENT; number++);if (number < 10000) {// open the fileout0.open(fileNameData(basename, number));out1.open(fileName(basename, number));header_written = false;cout << "Opening output file " << fileNameData(basename, number)<< endl;}else {cerr << "Cannot find a free file among " << fileNameData(basename, 0)<< " to " << fileNameData(basename, number - 1) << endl;out0.open("/dev/null");out1.open("/dev/null");}}}bool NumericPlaneOutput::setOutputFile(const vstring& f){// this carries the base name for the filebasename = f;// reset the file search number to zeronumber = 0;// switch output filesheader_written = true; switchFiles();return true;}void NumericPlaneOutput::startModule(const TimeSpec &time){do_output.switchOn(time);}void NumericPlaneOutput::stopModule(const TimeSpec &time){do_output.switchOff(time);}bool NumericPlaneOutput::isPrepared(){return t_output.isValid() && t_controls.isValid()&& t_display_type.isValid();}void NumericPlaneOutput::doStep(const TimeSpec& ts){const SpacePlaneY* y;const PrimaryControls* u;// check for changes in display typeif (t_display_type.getNumWaitingEvents(ts)) {const Event<DisplaySelect>* e;t_display_type.getNextEvent(e, ts);display_plus_tunnel = e->getEventData()->type;}if (getAndCheckState(ts) == SimulationState::Advance) {t_output.getAccess(y, ts);t_controls.getAccess(u, ts);// before sending data, write, if applicable, the headercheckHeader();// read out the pilot inputs, and write to fileout0 << ts.getValidityStart() << ' ' << ts.getValidityEnd() << ' '<< u->stick_roll << ' ' << u->stick_pitch << ' '<< u->roll_moment << ' ' << u->pitch_moment << ' '<< u->roll_rate << ' ' << u->pitch_rate;// read out all output data, and write to filefor (int ii = 0; ii < NOUTPUTS; ii++) {out0 << ' ' << y->Y[ii];}out0 << endl;t_output.releaseAccess(y);t_controls.releaseAccess(u);}}void NumericPlaneOutput::loadSnapshot(const TimeSpec& ts, const Snapshot& snap){switchFiles();}const ParameterTable* NumericPlaneOutput::getMyParameterTable(){static const ParameterTable table[] = {{ "set-output-file", new MemberCall<NumericPlaneOutput,vstring>(&NumericPlaneOutput::setOutputFile)},{ NULL, NULL}};return table;}static TypeCreator<NumericPlaneOutput>a(NumericPlaneOutput::getMyParameterTable()); -
The evaluator shows a window on the screen of the experimenter's PC, with current values and overview values. The windowing toolkit that is used is gtk+. With a GUI designer glade, it is easy to draw such a window. A few callback functions (which must have a "C" linkage specification) are written to handle the events from the interface.
/* ------------------------------------------------------------------ *//* item : Evaluator.hxxmade by : Rene' van Paassendate : 001214category : header filedescription :changes : 001214 first versionlanguage : C++copyright : (c) 2016 TUDelft-AE-C&Scopyright : (c) 2022 René van Paassenlicense : EUPL-1.2*/#ifndef Evaluator_hh#define Evaluator_hh#ifdef Evaluator_cc#endif#include <libguile.h>#include <gtk/gtk.h>#include <dusime.h>#include "SpacePlaneY.hxx"#include "DisplaySelect.hxx"#include <Snapshot.hxx>#include "Variance.hxx"#include "Interpolator.hxx"class DirectPacker;class Evaluator: public SimulationModule{StreamChannelReadToken<SpacePlaneY> input;EventChannelReadToken<DisplaySelect> display_select;GtkWidget *window;GtkEntry *h_altitude, *h_sinkrate,*h_sigma_y_1, *h_sigma_z_1,*h_sigma_y_2, *h_sigma_z_2,*h_sigma_y_3, *h_sigma_z_3,*h_delta_y, *h_delta_z;bool is_reset;Variance v_initialy, v_initialz,v_flarey, v_flarez,v_finaly, v_finalz;int tunnel;static const unsigned int NTUNNELS;vector<Interpolator> path;vector<double> x_flare, x_final;double z_stop;float altitude, sinkrate,present_x,delta_y, delta_z;Callback<Evaluator> cb, cb2;ActivityCallback keep_up;ActivityCallback feedback;bool feedback_timing_set;public:static const char* const classname;static const ParameterTable* getMyParameterTable();public:Evaluator(Entity* e, const char* part, const PrioritySpec& ts);/// destructor~Evaluator();/// further specification, update ratebool isPrepared();/// start responsiveness to input datavoid startModule(const TimeSpec &time);/// stop responsiveness to input datavoid stopModule(const TimeSpec &time);/// specify prediction timebool setFile(const vstring& f);/// specify rate at which display is updatedbool setFeedbackRate(const TimeSpec& ts);bool setFlare(const double& f);bool setFinal(const double& f);private:/// the method that implements the main calculationvoid doCalculation(const TimeSpec& ts);void feedBack(const TimeSpec& ts);protected:/// restoring state from snapshotvoid loadSnapshot(const TimeSpec& t, const Snapshot& snap);};#endif/* ------------------------------------------------------------------ *//* item : Evaluator.cxxmade by : Rene' van Paassendate : 001214category : body filedescription :changes : 001214 first versionlanguage : C++copyright : (c) 2016 TUDelft-AE-C&Scopyright : (c) 2022 René van Paassenlicense : EUPL-1.2*/#define Evaluator_cc#include "Evaluator.hxx"#include <strstream>#define RT#define RTW_GENERATED_S_FUNCTION#include "StatesOutputs.hxx"#include <Ticker.hxx>extern "C" {#include "interface.h"#include <support.h>}#define DO_INSTANTIATE#include <dusime.h>const char* const Evaluator::classname = "evaluator";const unsigned int Evaluator::NTUNNELS = 3;Evaluator::Evaluator(Entity* e, const char* part, constPrioritySpec& ps) :SimulationModule(e, classname, part, NULL),input(getId(), NameSet(getEntity(), "SpacePlaneY", part)),display_select(getId(), NameSet(getEntity(), "DisplaySelect", part)),is_reset(true),tunnel(0),z_stop(0.0),cb(this, &Evaluator::doCalculation),cb2(this, &Evaluator::feedBack),keep_up(getId(), "evaluation calculation", &cb, ps),feedback(getId(), "evaluation feedback", &cb2, PrioritySpec(0,0)),feedback_timing_set(false){// create the gtk window. This version assumes singletonwindow = create_evaluator();gtk_widget_show(window);#define LOOGUP_ENTRY(A) \h_ ## A = GTK_ENTRY(lookup_widget(window, #A ))LOOGUP_ENTRY(sinkrate);LOOGUP_ENTRY(altitude);LOOGUP_ENTRY(sigma_z_1);LOOGUP_ENTRY(sigma_y_1);LOOGUP_ENTRY(sigma_z_2);LOOGUP_ENTRY(sigma_y_2);LOOGUP_ENTRY(sigma_z_3);LOOGUP_ENTRY(sigma_y_3);LOOGUP_ENTRY(delta_y);LOOGUP_ENTRY(delta_z);#undef LOOGUP_ENTRY// attach my activity to incoming data from the panekeep_up.setTrigger(input);feedback.setTrigger(*Ticker::single());}Evaluator::~Evaluator(){//}bool Evaluator::isPrepared(){return display_select.isValid()&& input.isValid() // channels valid&& path.size() == NTUNNELS // (3) paths defined&& x_flare.size() == NTUNNELS // (3) start of flare&& x_final.size() == NTUNNELS // (3) start of final&& feedback_timing_set; // feedback timing set}void Evaluator::startModule(const TimeSpec &time){keep_up.switchOn(time);feedback.switchOn(time);}void Evaluator::stopModule(const TimeSpec &time){keep_up.switchOff(time);feedback.switchOff(time);}void Evaluator::loadSnapshot(const TimeSpec& ts, const Snapshot& snap){// this just means that we start anew, reset the counters// and zero the deviationsv_initialy.zero(); v_initialz.zero();v_flarey.zero(); v_flarez.zero();v_finaly.zero(); v_finalz.zero();altitude = 0.0; sinkrate = 0.0;is_reset = true;}void Evaluator::doCalculation(const TimeSpec& ts){// check for changes in pathif (display_select.getNumWaitingEvents(ts)) {const Event<DisplaySelect>* e;display_select.getNextEvent(e, ts);tunnel = e->getEventData()->type % NTUNNELS;}// do normal simulation/feedback stuffswitch (getAndCheckState(ts)) {case SimulationState::Advance:{const SpacePlaneY* y;input.getAccess(y, ts);// read out values from yaltitude = y->Y[Y_z];sinkrate = y->Y[Y_sink_rate];// get the normative value for the pathpath[tunnel].charge(y->Y[Y_x]);// add the deviations to the variance trackerspresent_x = y->Y[Y_x];delta_z = y->Y[Y_z] - path[tunnel].getZ();delta_y = y->Y[Y_y];if (altitude > z_stop) {if (present_x > x_flare[tunnel]) {v_initialy.add(y->Y[Y_y]);v_initialz.add(y->Y[Y_z] - path[tunnel].getZ());}else if (present_x > x_final[tunnel]) {v_flarey.add(y->Y[Y_y]);v_flarez.add(y->Y[Y_z] - path[tunnel].getZ());}else if (present_x > 0.0) {v_finaly.add(y->Y[Y_y]);v_finalz.add(y->Y[Y_z] - path[tunnel].getZ());}}input.releaseAccess(y);break;}case SimulationState::HoldCurrent:// nothingbreak;}}void Evaluator::feedBack(const TimeSpec& ts){// zero the display after a reset/inco loadif (is_reset) {char buf[] = "0.0";gtk_entry_set_text(h_altitude, buf);gtk_entry_set_text(h_sinkrate, buf);gtk_entry_set_text(h_sigma_y_1, buf);gtk_entry_set_text(h_sigma_z_1, buf);gtk_entry_set_text(h_sigma_y_2, buf);gtk_entry_set_text(h_sigma_z_2, buf);gtk_entry_set_text(h_sigma_y_3, buf);gtk_entry_set_text(h_sigma_z_3, buf);is_reset = false;}else {// feed back results to the screenchar buf[16];{strstream s1(buf, 16);s1 << delta_y << '\000';gtk_entry_set_text(h_delta_y, buf);strstream s2(buf, 16);s2 << delta_z << '\000';gtk_entry_set_text(h_delta_z, buf);}{strstream s1(buf, 16);s1 << altitude << '\000';gtk_entry_set_text(h_altitude, buf);strstream s2(buf, 16);s2 << sinkrate << '\000';gtk_entry_set_text(h_sinkrate, buf);}{strstream s1(buf, 16); s1 << v_initialy.sigma() << '\000';gtk_entry_set_text(h_sigma_y_1, buf);strstream s2(buf, 16); s2 << v_initialz.sigma() << '\000';gtk_entry_set_text(h_sigma_z_1, buf);}{strstream s1(buf, 16); s1 << v_flarey.sigma() << '\000';gtk_entry_set_text(h_sigma_y_2, buf);strstream s2(buf, 16); s2 << v_flarez.sigma() << '\000';gtk_entry_set_text(h_sigma_z_2, buf);}{strstream s1(buf, 16); s1 << v_finaly.sigma() << '\000';gtk_entry_set_text(h_sigma_y_3, buf);strstream s2(buf, 16); s2 << v_finalz.sigma() << '\000';gtk_entry_set_text(h_sigma_z_3, buf);}}}bool Evaluator::setFile(const vstring& f){// make a new interpolatorpath.push_back(Interpolator());// tell it to read the filebool result = path.back().load(f.c_str());// undo changes in case of no successif (!result) {path.pop_back();return result;}return true;}#define FT_TO_METER 0.3048bool Evaluator::setFlare(const double& f){x_flare.push_back(f * FT_TO_METER);return true;}bool Evaluator::setFinal(const double& f){x_final.push_back(f * FT_TO_METER);return true;}bool Evaluator::setFeedbackRate(const TimeSpec& ts){feedback.setTimeSpec(ts);feedback_timing_set = true;return feedback_timing_set;}const ParameterTable* Evaluator::getMyParameterTable(){static const ParameterTable table[] = {{ "set-path",new MemberCall<Evaluator,vstring>(&Evaluator::setFile)},{ "set-flare",new MemberCall<Evaluator,double>(&Evaluator::setFlare)},{ "set-final",new MemberCall<Evaluator,double>(&Evaluator::setFinal)},{ "set-feedback-timing",new MemberCall<Evaluator,TimeSpec>(&Evaluator::setFeedbackRate)},{ "set-stop-height",new VarProbe<Evaluator,double>(REF_MEMBER(&Evaluator::z_stop))},{NULL, NULL}};return table;}static TypeCreator<Evaluator> a(Evaluator::getMyParameterTable());
You see that there is certainly some code writing in making a module. Fortunately, most of the code can be generated by the script "newModule". This script is installed with the dueca program. Run it with the name of your new module (e.g. MyModule), and it will produce a MyModule.cxx and a MyModule.hxx file. The comments in these files should guide you with the job of tailoring the module to your application.
Model configuration file.
The example simulation runs on 3 PC's, connected with fast ethernet. The division of modules over the PCs is as follows:
-
Node number 0 is the experimenter's PC. DUECA runs all administrative duties, and also reads the model data from the dueca.mod file, on node number 0. The following modules are implemented here:
- The space plane module
- The numeric output module
- The evaluator module.
-
Node number 1 is the control loading PC, running QNX. This PC does the control loading simulation, and it runs the rate reduction module. Since this is the fastest-running PC (cycle-time wise), it is the clock master.
- Node number 2 is the display PC. It only runs the display module.
Scheme is a full-fledged programming language, and therefore the model configuration file in fact contains a simple program. To make life a bit easier, we can define often-used variables in the model configuration file as Scheme variables. That is what this first part of the configuration file does:
Dueca itself also needs some modules. Here they are:
And then the modules for the spaceplane are created.
Notice the use of the "if (equal? this-node-id cl-node)" construction. All modules defined within the if statement are designated for that node. If this is not used, the modules will be created in all nodes in parallel, and this would certainly give channel conflicts.