Understanding the basics.
Node and process
DUECA is meant for running a real-time program on a set of connected computers. In its simplest form there is only one such computer, and one DUECA program running on that computer. This is a DUECA process with only one node. If you are using multiple computers, then normally each computer runs a DUECA program, and you have as many DUECA nodes as there are computers in your set-up. It is also possible to run several DUECA programs on the same computer (this is usually done by your DUECA developer, me, to test out communication and functioning). Then each of these programs is also a DUECA node.
Module
A module in DUECA can best be described as a "self-contained object that implements a data transformation process". For example a module that calculates the dynamic motions of an aircraft. Modules communicate with the rest of their simulated world via channels. A module must run within one node, it cannot be distributed over different nodes.
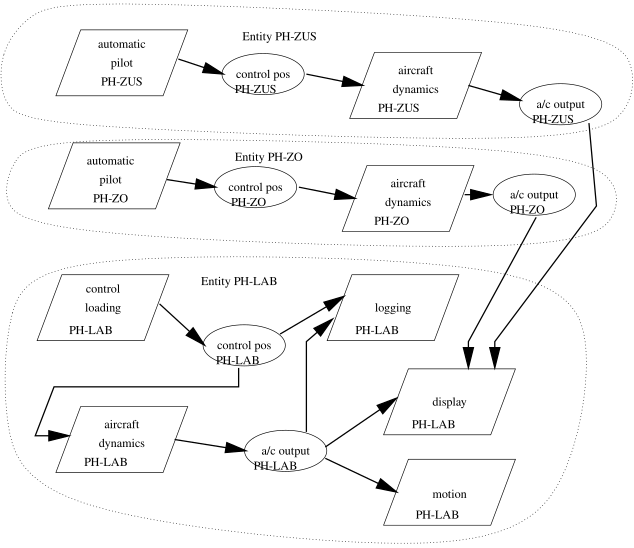
Entity
If you compose – for example – an aircaft model from a number of different modules, then that combined model is called an entity. DUECA can handle multiple entities, of the same type or of different types, in one process. An entity may be distributed over different nodes.
Channel
A channel is the means of communication between modules in DUECA. A channel is specific for one type of data, but modules can use multiple channels to exchange data (and possibly each channel transports a different type of data). Two types of channel exist, stream channel and event channel. The basic communication of a module with a channel is, in a conversation metaphor, of the following kind:
-
Asking data from a stream channel; what is the value of xxx at time yyy?
-
Asking data from an event channel; give me the next event that occurred at or before time yyy.
-
Sending data over a stream channel; from time yyy until time yyy+step, your data will be xxx.
-
Sending data over an event channel; at time yyy something happened (an event), xxx is the associated data.
Note that with the introduction of DUECA 2.0, the two channel types are actually implemented by one class, the "UnifiedChannel". By constructing a write token (see below) for such a channel, you can specify whether the timing of the objects in the channel entry represent stream or event data.
Access token
Modules cannot talk directly to a channel, instead, they need to make an access token first. Access tokens are for either writing (write token) or reading (read token). When the access token is constructed, the name of the channel is given as one of its parameters. The access token looks up the channel, and keeps a permanent reference to the channel. When writing to the channel or reading it, the module uses the access token.
Activity
A module in a simulation normally has one main activity, and that involves reading the new input data, updating its state and sending out its output data. This activity has to take place at regular intervals, e.g. at 20 msec intervals for the calculation of aircraft dynamics.
If you have a conventional single-computer program for your simulation, you call a method or function that does the update at the appropriate moment, normally after you called the function that collected the new input data, and before the function that sends the output data to the simulation hardware. As you distribute a program over multiple computers, and when parts of the program run at different update rates, it becomes more difficult to determine the point at which you should start the calculation.
In DUECA there is no "main loop" in which to insert calls to your updating code at the proper points. Instead, each module has to make sure that it gets called at the proper times by creating an Activity object. Then for that activity object, the module specifies:
-
The conditions under which the activity should be run. For a module within the simulation this is normally when all the data it needs is available. For a hardware module (one that interfaces with the simulation hardware, and should behave safely also when other modules in the simulation fail to deliver their data, or deliver nonsense data) this is usually on the passing of time.
-
The update rate for the activity. If the update rate is not specified, then the activity is called at the update rate of the incoming data, otherwise the specified update rate is forced, taking precedence over any rates the incoming data would have.
In this way, a DUECA simulation can be assembled by just throwing together the proper modules. The allocation of activity by each individual module and the specification of the conditions under which the activity should be run give DUECA the necessary information to schedule all activities in a node.
Time specification
Time in DUECA is discrete, it jumps forward in small integer steps. The value in seconds represented by a step of one ("1") in the integer representation, can be queried from the Ticker object that is present in each DUECA node
The integer time increments in a node are not always one. Consider the following example of two nodes; on one node a control loading simulation is run with an update rate of 2000 Hz. The basic increment is 1, i.e. each 500 microsec the integer time value is increased by one. The second node has an update rate of 50 Hz, and the basic increment in this node is 40. This means that every 20 msec (50 Hz) the integer time is increased by 40. The time step in this node is 20 msec, while the time granule is 500 microsec (0.0005 s), the same as for the other nodes. All the nodes in a DUECA process must have the same time granule, but they may have different time steps.
Event data is marked by one (integer) time, of the time cycle in which the event occurred. Events are assumed to have happened at a discrete moment in time. Stream data is always marked by a "time specification", which has two times; the (integer) time of the cycle in which the data becomes valid, and the time of the cycle in which the data is no longer valid. For example a time spec (10, 12) means that the stream data is valid from 10*(time granule) to (but not including!) 12*(time granule). Normally the stream data in a channel is contiguous, so the next data will have time specification (12, 14), or perhaps (12, 20), anyhow, starting with the end of the previous time interval. Exceptions to this occur when the simulation has been paused for a while. DUECA internally also uses the clock and time specification, so the clocks and time always run on, while a simulation may be temporarily stopped.
Periodic time specification
Sometimes, or often, you want that a calculation is periodically invoked. For example the simulation of aircraft dynamics has to be called every 0.01 s. Now, the input data for this calculation may or may not be delivered at this update rate. If you simply connect the activity to the input channels, then the activity will be called at the rate with which new data comes in on these input channels. By creating a periodic time specification, and feeding that to the activity with the dueca::Activity::setTimeSpec() member function, you can specify that the dynamics update has to take place periodically, regardless of the rate at which the data comes in.