A base class from which users can derive Real-Time Workshop modules. More...
#include <RTWModule.hxx>
Public Member Functions | |
| bool | XmlSnapshotNow (const TimeSpec &ts) |
| Returns true if an xml snapshot has to be taken in this cycle. | |
| virtual void | fillXmlSnapshot (const TimeSpec &ts, XmlSnapshot &snap) |
| If xml snapshots are generated, this has to be implemented by a descendant. | |
| virtual void | loadXmlSnapshot (const TimeSpec &ts, const XmlSnapshot &snap) |
| For restoring state, model parameters, and initial inputs from a previously generated xml file. | |
| Public Member Functions inherited from dueca::Module | |
| virtual | ~Module () |
| Destructor. | |
| virtual bool | complete () |
| Inform the module that all parameters have now been passed. | |
| virtual bool | isPrepared ()=0 |
| To check whether the module is ready for work. | |
| virtual bool | isInitialPrepared () |
| To check whether the module is prepared to be prepared. | |
| ObjectType | getObjectType () const |
| The object type within DUECA. | |
| virtual void | startModule (const TimeSpec &time)=0 |
| Start the module's activity (activities) | |
| virtual void | stopModule (const TimeSpec &time)=0 |
| Stop the module's activity (activities) | |
| virtual void | initialStartModule (const TimeSpec &time) |
| Initial start opportunity. | |
| virtual void | finalStopModule (const TimeSpec &time) |
| Final stop command. | |
| const Entity * | getMyEntity () |
| Return a pointer to the entity to which this module belongs. | |
| const ModuleState & | getState () |
| Return the module state. | |
| Public Member Functions inherited from dueca::NamedObject | |
| const std::string | getEntity () const |
| Returns the "entity" part of the name. | |
| const std::string | getClass () const |
| Returns the "class" part of the name. | |
| const std::string | getPart () const |
| Returns the sub-entity or "part" part of the name. | |
| const NameSet & | getNameSet () const |
| This returns the complete name set. | |
| const GlobalId & | getId () const |
| This returns the id. | |
Protected Member Functions | |
| RTWModule (Entity *e, const char *m_class, const char *part, const IncoTable *table=NULL, int state_size=0) | |
| Constructor. | |
| virtual | ~RTWModule () |
| Destructor. | |
| Protected Member Functions inherited from dueca::SimulationModule | |
| SimulationModule (Entity *e, const char *m_class, const char *part, const IncoTable *table=NULL, int state_size=0) | |
| Constructor. | |
| virtual | ~SimulationModule () |
| Destructor. | |
| SimulationState::Type | getAndCheckState (const TimeSpec &ts, bool confirm_transition=true) |
| Returns the state of the simulation at this time. | |
| void | transitionComplete () |
| If a transition was not (implicitly) confirmed in the getAndCheckState call (second argument false), confirm with this call that it is now complete. | |
| SimulationState::Type | getCurrentState () |
| If you "forgot" what the state from a previous getAndCheckState() call was, you can remember it here. | |
| DusimeModule (Entity *e, const char *m_class, const char *part, const IncoTable *inco_table, int state_size) | |
| Constructor. | |
| virtual | ~DusimeModule () |
| Destructor. | |
| bool | snapshotNow () |
| Returns true if a snapshot has to be taken in this cycle. | |
| virtual void | fillSnapshot (const TimeSpec &ts, Snapshot &snap, bool from_trim) |
| If snapshots are generated, this has to be implemented by a descendant. | |
| virtual void | loadSnapshot (const TimeSpec &ts, const Snapshot &snap) |
| For restoring the state from an old snapshot. | |
| void | trimCalculationCondition (TriggerPuller &cond) |
| This can be used to specify the condition under which the trim calculation may take place, for example, data has to be received on trim calculation input channels. | |
| virtual void | trimCalculation (const TimeSpec &ts, const TrimMode &mode) |
| This must be overridden if the module takes part in trim condition calculations. | |
| Protected Member Functions inherited from dueca::Module | |
| Module (const Entity *e, const char *m_class, const char *part) | |
| Constructor. | |
| virtual void | setSafetyStop () |
| Put a brake on this module's activities. | |
| Protected Member Functions inherited from dueca::NamedObject | |
| NamedObject (const GlobalId &id) | |
| Reserve for AssociateObject. | |
| NamedObject (const NameSet &ns) | |
| Normal constructor, protected, because it has no use to create a NamedObject by itself. | |
| virtual | ~NamedObject () |
| Destructor. | |
Additional Inherited Members | |
| SnapshotState | snap_state |
| State of the snapshot taking. | |
| Protected Attributes inherited from dueca::Module | |
| ModuleState | state |
| Flag to remember whether we are stopped due to some error with hardware device manipulation. | |
Detailed Description
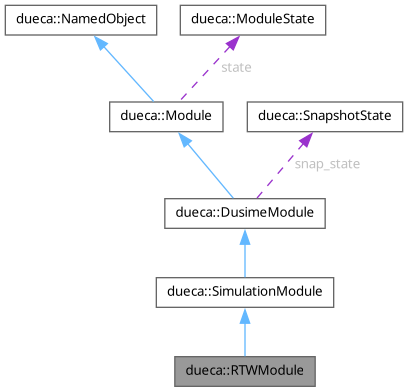
A base class from which users can derive Real-Time Workshop modules.
The RTWModule base class implements the basic communication for a DUSIME module. By deriving from this class, using its methods to dermine the simulation state, and re-implementing applicable virtual methods, a fully DUSIME-aware class can be made, and objects of this class have coordinated start-stop abilities, the ability to calculate initial conditions and the ability for saving and restoring simulation state. A RTWModule can also store and restore RTW model state and parameters, from and to an xml description. This enables translation of states and parametersets between your DUECA simulation and the MATLAB workspace.
Constructor & Destructor Documentation
◆ RTWModule()
|
protected |
Constructor.
- Parameters
-
e Pointer to my entity m_class String with name of the module class part String with part name table Pointer to the table with initial condition calculation definitions. If this class does not take part in calculation of initial conditions (other than possibly sendin on data), this pointer may be NULL. state_size Size of the state, as sent in a snapshot.
Member Function Documentation
◆ XmlSnapshotNow()
| bool dueca::RTWModule::XmlSnapshotNow | ( | const TimeSpec & | ts | ) |
Returns true if an xml snapshot has to be taken in this cycle.
If this returns true, you should keep a copy of the continuous and/or discrete states of the RTW model, at a location of your discretion. This copy will later be sent with the sendXmlSnapshot call.
◆ fillXmlSnapshot()
|
virtual |
If xml snapshots are generated, this has to be implemented by a descendant.
The default implementation for this function is included when generating a new RTW module with the 'new-module' command, and subsequently xml functionality is selected. Currently this is functional for RTW version 5.0 and up.
- Parameters
-
ts For your reference, the time specification of the snapshot command snap The XmlSnapshot that has to be filled.
◆ loadXmlSnapshot()
|
virtual |
For restoring state, model parameters, and initial inputs from a previously generated xml file.
This should take the snapshot data, unpack it (so keep aligned with the sendXmlSnapshot routine), and use this to replace the current state, parameters, and inputs. Note that the model will not be running at this time, so – if you don't touch your state in HoldCurrent, as you should not – this can run in parallel to the simulation without locking. Default implementation for this function is included in the rtw model template.
The documentation for this class was generated from the following file:
- /home/abuild/rpmbuild/BUILD/dueca-4.3.1-build/dueca-4.3.1/dusime/RTWModule.hxx