Introduction
The A Simple Simulation chapter explained how to create a DUECA simulation with one "player", re-use existing modules, create new modules, and configure a simulation for running on a multi-computer set-up.
Here we look at how to connect multiple simulations together. In this way, a multiplayer simulation can be made. Each player has his/her own DUECA controls, and can start and run independently from the other players. However, data between players can be exchanged, so it is possible to "see" the other players, by, e.g., showing their avatars / graphical models in the world visualisation.
We will start by adding a simple module to our simulation to track whoever is currently "in the game". Then we discuss ways of configuring the multi- player simulation.
Overview module
Initial code generation
To track what is happening, we will create an overview module. Use the dueca-gproject command to get a new module called monitor-teams. Now enter the monitor-teams folder and create code for the modules. Teams can join at any time, and start moving (with the DUECA Advance mode) at any time, and each team will have their own DUECA process to control. So it makes no sense to make the monitoring module dependend on DUSIME state, we simply always monitor. The monitoring module can therefore be a pure DUECA module:
Ensuring we can read channel data
We can use the BaseObjectMotion DCO datatype from the WorldView project to send information about moving objects around. To be able to read that, this must be added to the comm-objects.lst file, add the following line:
WorldView/comm-objects/BaseObjectMotion.dco
The DUECA interconnection facilities can also send information on joining and leaving peers. That is given in a ReplicatorInfo DCO, which is installed with the DUECA headers and libraries. We need to add that later to MonitorTeams.cxx. Define two read tokens in the MonitorTeams.hxx header file, called r_announce and r_world, and uncomment the line that defines a clock (myclock).
Adding a second activity to the module
Our "overview" module will be very simple, we just print information on joining and leaving peers, and information on the entries we find in the channel with BaseObjectMotion objects. To simplify our design, we add a second callback and a second activity to the module, just for printing the notifications. This needs the following in the header file:
- A callback object: Add this below the first callback object./** Callback object for simulation calculation. */Callback<MonitorTeams> cb2;
- A second activity: Add it below the first activity object./** Activity for simulation calculation. */ActivityCallback do_notify
- and a function that is to be called: Add it below the doCalculation function declaration./** print a notification about a leaving or joining peer */void doNotify(const TimeSpec& ts);
Writing the implementation
Now take a look at the MonitorTeams.cxx file. You may notice it is a bit smaller than the UFODynamics files, it misses parts for the DUSIME communication; different modes to run in, and sending and receiving snapshots.
The announcement channel should have only one entry in it. It contains ReplicatorInfo objects, and they are written as events. The channel name will be configurable from the script, but we will use a simple convention; ReplicatorInfo://<entity name>, where in this example the entity name is will central. To have access to the definition, we will include the proper header:
Now add the tokens to the constructor implementation:
I also added the uncommented clock in the code snippet, the two callback objects and the two activities. Each of these activities needs a trigger. In the body of your MonitorTeams constructor, set the trigger for your do_calc to the clock you just uncommented, and the trigger for the do_notify to the r_announce dueca::ChannelReadToken.
You would want the notification activity to always work. To do that, we can switch it on in the complete() method, and switch it off again in the destructor. If you don't specify a time for the switchOn()/switchOff() calls, it basically means now!
Add to the complete method:
And to stop this again in the destructor:
The check-up on current status is done on the basis of time. Adapt the setTimeSpec call to modify the clock, don't use the activity's dueca::Activity::setTimeSpec() method in this case:
We need to check the two tokens in the isPrepared call:
Switching the main (do_calc) activity on and off is already present in the startModule and stopModule calls.
Adapt the doCalculation method to run through all entries in the r_world token, and print the result:
With this set-up, the DataReader will try to find the very latest data from the channel, if you omit the dueca::MatchIntervalStartOrEarlier specifier, it will throw a dueca::NoDataAvailable exception when data for the requested time is not yet there. It might still throw the exception when there is not data yet for the entry.
The new doNotify method looks very simple, we just print the received event:
This works only because DUECA will generate exactly one activation for each time the channel with ReplicatorInfo objects is written, and that calls one run of the doNotify method, with the correct time specification.
Adapting the UFODynamics module
We now have a monitor module for information that different teams may send us, but what information will we get from the teams? We need to add an extra output to the UFODynamics module, and we will send this information over a channel that is shared by all teams.
Open the UFODynamics.hxx file, and add a write token for the world:
And in the UFODynamics.cxx file, initialise it in the constructor:
You can see that instead of getEntity() in the NameSet, i.e., the name of the channel, we simply hardcoded "world". This will generate a channel with the name of BaseObjectMotion://world. The label of the channel is then again set to our entity name, so in the examples below that will be team1 or team2. The channel has stream data (continuous positions) and can have multiple entries.
We already write a BaseObjectMotion DCO for driving the viewpoint in the 3D world. We can add two lines to the doCalculation method to copy that over to the world channel, so after writing the position to w_egomotion, add:
Platforms
Set-up teams
Let's now mis-use DUECA's carefully laid out file configuration, and create a platform for a simulation with the monitor and for two (for example) simulations with each a team (we actually should be creating three platforms with each one node).
This gives us three places to run a single-node DUECA process from. We will adapt the dueca_mod.py file that is in the solo platform for the two teams; copy that one over the respective files in the team1 folder. While you are at it, also copy over the links.script file to the team1 and team2 folder.
Now for making sure we can communicate. Add inter to the list of DUECA_COMPONENTS in the main CMakeLists.txt file, this adds all inter-communication code to your executable.
Now open the copied dueca_mod.py file. Rename the entity, replace all occurrences of SIMPLE with team1.
Let's modify also the stick interface. You might not have two joysticks on your computer (if you have, simply skip this step, and configure one of the teams to use the second one), so we will use a small GUI to provide joystick input. Find the flexi-stick code, remove the add_device line (which accessed the first SDL device), and replace it with the configuration to create a gui interface:
The funny specification of the argument to add-virtual is needed because a list or tuple is expected here. If you forget the round (or square) brackets around "logi", Python will interpret "logi" as an iterable of characters, and feed the function connected to add-virtual with ‘('l’, 'o', 'g', 'i')`, which will lead to an error message. The rest of the joystick configuration can stay the same.
Now make sure we send information on the position to the other simulations, add the following module:
This is the replicator. It will contact a master replicator on the given websocket url, you can see that is on the local host interface.
For team2, you can use almost the exact same dueca_mod.py file, copy it over, and change all occurrences of team1 with team2.
Monitor configuration
The configuration for the monitor, in central, is a bit different. Let's call this entity "central". We will add only our new monitoring module:
And now a channel replicator, but the master. This one needs a bit more configuration:
With the list in watch_channels, you determine which information is copied between the different DUECA processes. Such a copied channel must have the same name in all linked DUECA processes. The master replicator will inform the peers which channels those are. Any entry found in those channels (and created locally where it is found), will be read by the replicators, and transmitted to the other replicators, and these will write the entry locally on the other ends.
The channel replicators have a number of additional options. It is possible to communicate over udp multicast, udp broadcast, udp point-to-point, or, as is done here, over websocket interfaces, by adapting the data url. Initial starting and configuration is always over websockets, and the peers will receive the details on how to transmit the data over the configuration websocket connection. It is also possible to configure the replicators when you are behind a network translating firewall, e.g., on a home network, by specifying which is the public URL. See the documentation for the replicators for that.
Testing things
You can start the dueca processes by opening shell windows in central, team1 and team2, first run the links.script files, and then simply start the dueca processes by entering:
Do this three times, once from each node folder. This will give you three DUECA main windows, one for the monitor, and two for the two teams. It should look something like the following, with the exception that your outside windows may be larger, and you have the shell windows open.
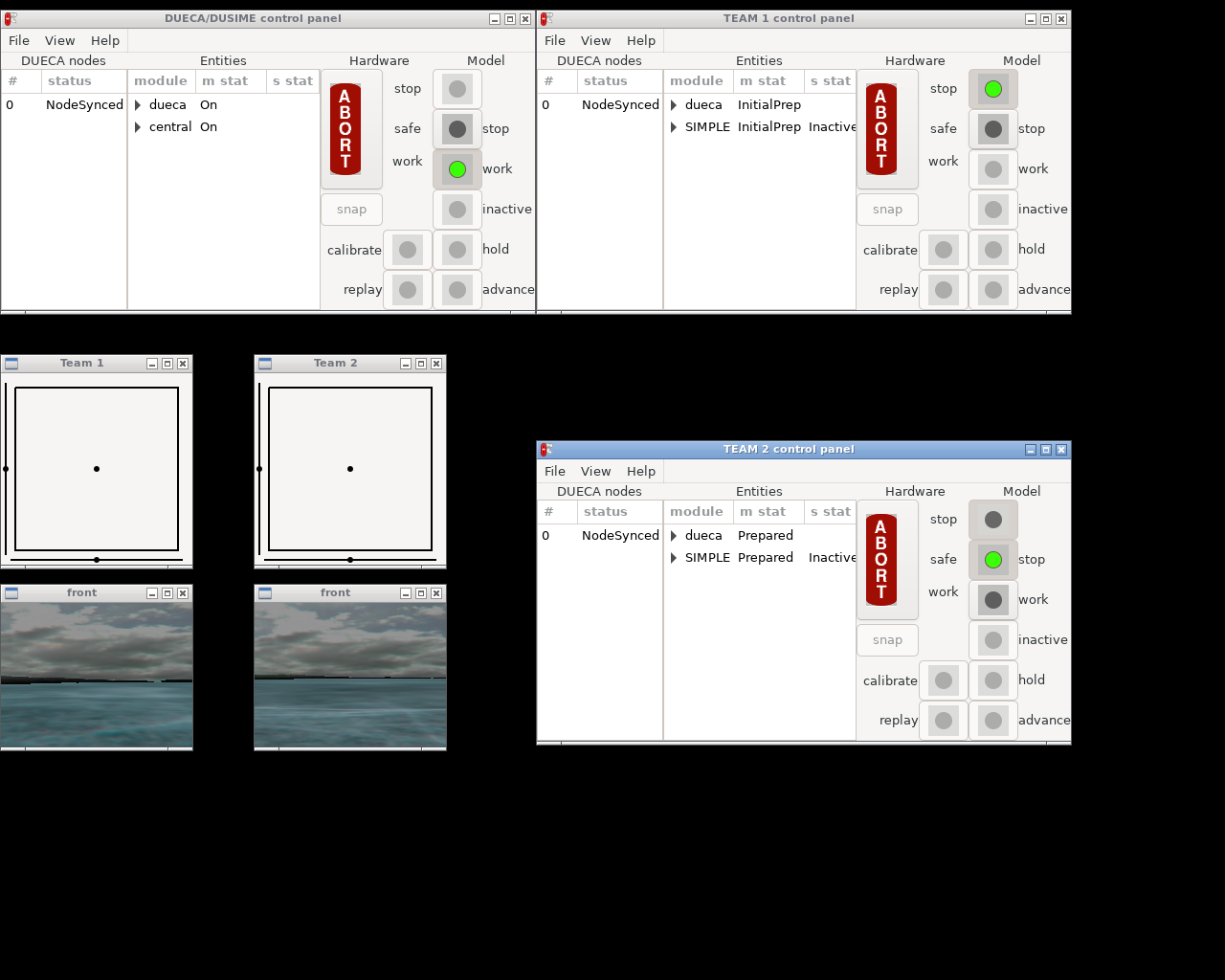
This screenshot is actually from a testcase for DUECA, the windows are adjusted to be so tiny so that it neatly fits on one screen.
Once you have the monitor in work (it won't go any further, because there are no DUSIME modules in that process), you will see messages about the other teams in your console. A team joins when its DUECA state machine is set to work, and you can operate the DUSIME buttons like in the previous example.
Seeing each other
It would be fun to actually be able to see other teams in the visual. I hacked together a very simple 3D model of a UFO-like vehicle, you can find the two files you need at platillo.obj and platillo.mtl
Place these files in the run/run-data folder of your project (if you want to keep them there, don't forget git add), and add the following to the links.script files in the teams folders:
Now in the configuration of the world-view module, we can modify the OSGViewer object to create visual objects for the teams. First we tell the world-view module to monitor the channel with teams for new entries:
In the definition of the OSGViewer, we add the classes for the teams:
When an entry is added to the world information channel, the viewer will try to match the type of data written (BaseObjectMotion) in combination with the label for the entry, which in our example can be team1 or team2. The last add-object-class-data specifies the case where the team names in the entry do not match, then a match is made on only the data type.
The matched entry is then connected to a visualisation of type moving defined in the OSGViewer. On creation, this visualisation takes one 3D model as argument, and when there is new data in the form of a BaseObjectMotion object in the channel, the position and orientation of that object are set to that data. To provide smooth movement, it is also possible to use the linear and angular velocity in the BaseObjectMotion object for extrapolation, to compensate for the delays in the simulation.
You should now see the frame of your own vehicle, and the other vehicles. If you have other models, you can of course substitute these, or you can maybe give each team different colours.