Global set-up hints and concepts on DUECA project organisation
Blocks and modules
DUECA facilitates the implementation of a data-flow architecture. Many real-time simulations have a data-flow nature. Consider the simple example in the accompanying diagram:
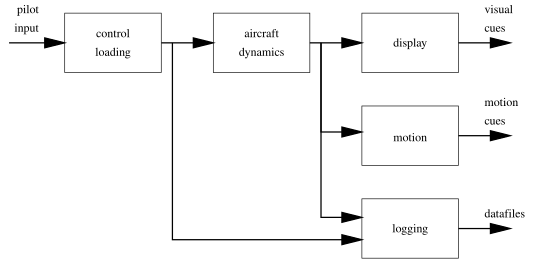
The motions of the real-aircraft can be characterised as changes in continuous physical variables, and a block diagram is a common format for representing the structure of a model of the aircraft. In a block diagram, the arrows represent signals, also typically expressed as continuous functions of time. In a digital simulation, all blocks have to be calculated with an update rate that is high enough to make the difference between the real "analogue" system and the digital implementation small enough to be unnoticeable.
In DUSIME, each block in a block diagram is normally represented by a "module". Two types of DUSIME modules are possible:
-
A SimulationModule. For a piece of simulation that is model-specific, and that does not do any (direct) communication with hardware, you should implement a SimulationModule. You do this by creating a class that is derived from the dueca::SimulationModule class (Note for novice C++ programmers: Derived Classes).
-
A HardwareModule. This type of module is used to implement a piece of simulation that directly interfaces with the hardware of a simulator, for example the interfacing code for control loading hardware. A HardwareModule is implemented by creating a class that is derived from the dueca::HardwareModule class. Note that you only need a HardwareModule when you have to be careful with the hardware or with the user attached to that hardware. For interaction with a harmless device that does not require a specific set-up sequence (joysticks, displays), you can also use a SimulationModule or a plain DUECA Module.
The primary difference between a SimulationModule and a HardwareModule is that the latter receives commands from DUSIME that tell it when and how to control the hardware, for example commands to drive the hardware to a neutral position, perform a test on the hardware IO, etc. A HardwareModule also uses two main operation modes, one is implemented as a safe fallback, in which the only task is servicing the hardware, and the other for participation with the simulation, in which the module also communicates with the rest of the simulation.
Control loading hardware is controlled by such a HardwareModule. Upon the simulation start, it will run through a sequence where it connects to the hardware, activates the hardware, and then brings it slowly to a neutral position. Only when that is ready the other modules in a simulation are started and communication starts.
The main difference between a SimulationModule and a plain DUECA Module is that a SimulationModule distinguishes extra states useful in simulations, namely keeping the simulation frozen, advancing and replaying. A dueca::Module only runs or not. In this example, the display may be a normal Module; the instrumentation has to be re-drawn anyhow, with either the data from the frozen simulation or the data from the moving simulation. However, if you want to show an extra indicator telling a pilot to manually set the throttle to a starting position while the simulation is frozen, you would need a SimulationModule.
Data channels
In the block diagram given in the previous section, the data connections between blocks are represented by lines with arrow ends drawn between the blocks. The data that is "sent" over these lines consists of scalar variables or vectors. In DUECA these data connections are implemented by "channels", and the type of data that can be sent is flexible. A DUECA diagram of the block diagram given above is:
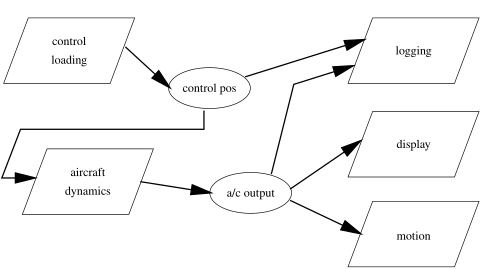
Each square block is a module, and each oval is a channel. Modules can write to channels and read from channels. A module "lives" within one DUECA node (a computer with DUECA running on it), and a channel can (but does not necessarily have to) "flow" between different nodes, i.e., it can be distributed between different DUECA nodes (something which is not shown on the diagram, because we want to emphasize the logical structure of the simulation).
Each channel can send a specific data type, but any kind of data can be sent across, strings, floating point values, integers, vectors or lists of these basic data types. The objects that can be sent through channels are called DUECA Communication Objects (DCO). In a DUECA project you will find these in the comm-objects (for communication objects) folders, and they have a filename with a '.dco' suffix. With a code generator, the DCO files are converted to C++ classes that can be sent through channels, here are some examples:
-
A data type for the primary controls (pitch, roll and yaw inputs with stick or yoke and rudder), let's call it PrimaryControls, with three data elements of type double:
(Type double);; Aircraft primary control inputs.(Stream PrimaryControls;; stick or yoke angle [rad](double stick_pitch (Default 0.0));; lateral stick or wheel angle [rad](double stick_roll (Default 0.0));; rudder excursion [m](double rudder_yaw (Default 0.0)))For more details see DUECA code generator The type of data needs to be declared in the file's header.
The following is a segment of what comes out of the code generator:
class PrimaryControls{public:double stick_pitch;double stick_roll;double rudder_yaw;// constructor, destructor and further members}; -
A data type for the output of an aircraft model. let's call it AircraftOutput, with an array of 20 elements of type double:
class AircraftOutput{public:// constructor, destructor and further members};You can see that this object uses a dueca::fixvector, a fixed-length vector. It is best to make the objects that you send over a channel have a fixed size, so memory allocation and de-allocation can be done efficiently. Variable-length vectors, such as provided in the stl, can be used, but incur an additional memory allocation and de-allocation overhead which is often not acceptable in a real-time program.
-
A data type for the input from a keyboard:
class KeyPress{uint8_t key;// constructor, destructor and further members};
Note that there are many more (and possibly much more complicated) examples of data that you may wish to send in a simulation. Note also that you should not code these data classes by hand; there is a code generator supplied with DUECA that generates these classes from a ".dco" (DUECA Communication Object) specification. It adds the code needed to pack and unpack the DCO objects, and optionally provides extra code for e.g., logging such an object.
Channel types
As was mentioned above, a channel handles a specific type of data, but channels can be set up for (almost) any type of data. Before DUECA 2.0, several channel types existed. In DUECA 2.0 these were unified into a single, very flexible, channel.
The older DUECA versions used two different types of channel, one for stream data, and the other for event data. Although additional variations are possible with the new DUECA channel code, this old distinction is a good starting point for discussing these two main channel variants:
-
A channel with "stream" data. A stream channel treats its data as a continuous update of some output or state value. This approximates a continuous, analogue value in the real world. The stream data should be updated regularly, and at each time it has a single, specific value. When stream data is updated, it is updated for a logical time span, indicating the period for which the data is considered valid.
-
A channel with "event" data. An event channel handles "event" data. An event is an occurrence that is unique in time, has no "duration", and it has some data associated with it. Event data is associated with a single point in time, and in a specific channel, and multiple events may be associated with the same time. Unlike stream data, where at any time in the simulation there is a valid value for the data, there may of course also be times that there are no events, and nothing is written in the channel.
Going about a design
The advised way of starting a design of a simulation for DUECA would be to set up a data flow model for the simulated system. Identify what parts of the simulated system you want to implement as an individual block, and create a SimulationModule (or HardwareModule) class for those parts. Carefully consider what data is transmitted between those modules, and whether this is better represented as "continuous" stream data or as discrete events.