This section of the manual assumes that you are already familiar with some of the concepts used in DUECA and DUSIME. If you encounter concepts that you are not familiar with, they should have a hyperlink to the documentation where they are explained, follow the hyperlink, and use the return button on your browser to get back to this section.
Using an example
This section of the documentation guides you through the creation of a few DUECA modules, at the hand of a simple example. This example is the first useful application ever implemented in DUSIME, a simulation of a lifting-body space plane, used for evaluation of handling qualities in the landing phase.
First some data about the example simulation. This simulation is implemented on the Human-Machine Systems lab of the Control and Simulation Division, Faculty of Aerospace Engineering
The simulation model of the equations of motion of the spaceplane, including the control augmentation system, was programmed in one Simulink model. Using the Real-Time Workshop (RTW) toolbox, C code was generated for this Simulink model. Input of the RTW code are the pitch and roll stick inputs, and the output of the code is an output vector with all spaceplane motions.
The simulation was controlled with a control loaded side stick. This stick uses a hydraulic servo motor to simulate mechanical properties, in this case the mechanical properties of a passive (mass, spring and damper) stick.
Instrument display was done on a PC with a fast graphics card. The display is drawn using the output of the RTW model.
In addition to the display output, output to file was needed. The stick force and position data, and the spaceplane model output data, were recorded at a 50 Hz rate. Output to the control position of the experiment leader was also needed, during the run some key variables were shown in a window at the experiment leader's position, and key variables at certain points in the experiment (points along the pre-defined trajectory) were also shown and recorded. In this way it was for example possible to see the sink rate at touch down directly after a run.
Modules (or Blocks)
The first step in designing the simulation is setting up a (DUECA) data flow diagram. This diagram defines the modules used in the simulation, and the data (types) they send to each other.
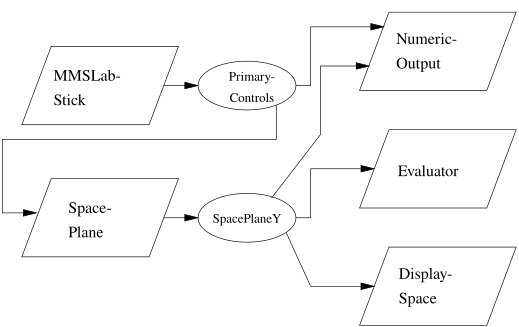
The data flow diagram contains the following blocks:
-
A module MMSLabStick, which reads the input force on the stick (i.e. directly from hardware), calculates the dynamics of the stick simulation, outputs the result of this calculation to the stick (to hardware), and also sends out stick position and force over a channel.
-
A module SpacePlane, which reads the stick input (position), feeds that to the RTW model, makes an update of the model, and sends out the output vector of the model over a channel.
-
A module DisplaySpace, which reads the spaceplane output vector, and draws the instrument display.
-
A module NumericOutput, which reads the spaceplane output vector the stick position and force data, and prints these to a file.
- A module Evaluator, which reads the spaceplane output vector, calculates the deviation from the nominal path and presents this and a few other key variables in a window.
These are all the modules that are needed from a model point-of-view. One other module is added for practical reasons. As will be explained in the following, the stick control loading and the spaceplane model run on different computers. The control loading has to run at a high update rate (2000 Hz), and it also produces data at 2000 Hz. The spaceplane model runs slower (50 Hz), and thus it needs every 40th output of the control loading model. Now, without modifications, DUECA would send the stick data at 2000 Hz to the other computers, where only 1/40 th of this data would be used. An additional routine, called RateRedution, which runs in the computer with the stick module, reads the stick data and writes it again with only 50 Hz.
Channels and data types
Data that is exchanged with external hardware (such as the side stick electronics) is input and output directly from the module controlling that hardware. All communication between modules however, should be done by DUECA channels. For each of the channels we use, the type of data that should be sent over the channels must be defined.
For example, the MMSLabStick module sends out stick roll position, stick roll force, stick pitch position and stick pitch force. As a bonus it also sends out the rate (velocity) of the stick roll and pitch position. All these data should be assembled in a C++ class that can be "sent over" a channel. Such classes should adhere to certain conventions, i.e. they need a method to be packed into a format for sending, and a method to be unpacked, etc. To make the writing of these data objects easier, a code generator has been written for DUECA. The code generator has to be fed with the following data, so that it can make the PrimaryControls object that is sent by the MMSLabStick module. This definition is written in a .dco file with the same name as the transmitted object, sod PrimaryControls.dco. Note that this file is quite bare, it is good practice to add a header block and comments to this file, and these will be transmitted also to the generated code.
(Type double)
(EventAndStream PrimaryControls
(double stick_roll )
(double stick_pitch )
(double roll_moment)
(double pitch_moment)
(double roll_rate)
(double pitch_rate)
)
The first line indicates that there is a basic type, "double", which is of course the double precision floating point type of C++. Then a new object class is defined, "PrimaryControls", which can be sent over both event and stream channels. This class has members stick_roll, stick_pitch, roll_moment, pitch_moment, roll_rate and pitch_rate, all of type "double". The code that is generated by the code generator can be seen here. Additional classes that are generated for the spaceplane simulation are the output of the spaceplane, "SpacePlaneY" and an event class that is used to switch between display types in the experiment, "DisplaySelect". This can all be specified in one file, so the rest of the generated-types file contains:
(EventAndStream SpacePlaneY
(double Y 29 ))
(Type int )
(Event DisplaySelect
(int type ))
If you are interested in the use of the code generator and the semantics of its input files, you can find all that here.
Names of modules and channels
As you may remember from the introduction, DUECA offers a "publish-subscribe" mechanism. This is a mechanism that enables a module to get to the data it needs, also when this module "does not know" exactly where the data is located. In simplified terms, a module can ask DUECA to give it access to a specific channel with data, if it knows how the data is called. As you may remember also from section on Entities DUECA can handle different entities in the same DUECA process. Now, a module should have the possibility to subscribe to a channel from its own entity, i.e. the entity that it belongs to, without having to worry about getting data from other entities.
To handle all this, DUECA uses a fixed naming scheme. I must warn you that this naming scheme is provisional, and that it will certainly be updated, but for now this is what is installed. Everything in DUECA, be it a channel or a module, has a name that consists of three elements:
-
The entity name, that is the name of the thing the module belongs to. For example, if we want to simulate the laboratory aircraft of the Faculty of Aerospace Engineering , then we would give all modules the entity name "PH-LAB". For the spaceplane we will use the entity name "space1" (since it does not really exist, and therefore it has no registration).
-
The class name, which is the name of what it really is. The class name is fixed for a certain class of module, and it is supplied in the C++ code of the module. For example for the MMSlabStick module class, the class name is "mmslab-stick".
-
To differentiate between multiple modules of the same class within an entity (for example if you simulate the engine of an aircraft with a certain module, and you have a two-, three- or four-engine aircraft), there is a third name component, the part name. Because the spaceplane simulation does not use the same module twice, this part name is not really needed in the example.
The naming for channels is similar to the naming for modules, but in this case the class name is equal to the class name of the data object that is sent over the channel.
Now in most cases, a module can know what channels to subscribe to on the basis of its own name. As an example, take the SpacePlane module. If we create an entity "space1", then the full name of the spaceplane module will be ("space1", "space-plane", ""), the first part for the entity name, the second for the class of the module, and the last part, the part name, is empty. (Note: for C++ classes the convention is to let each word of the class name begin with a capital letter. DUECA modules are however normally created from a Scheme script, and in Scheme the convention is to use all lower-case letters, and separate the words with a hyphen; "-". For DUECA modules therefore, we use the Scheme naming convention)
The SpacePlane module subscribes to the stick data and publishes the aircraft output vector. The channel name for the stick data is ("space1", "PrimaryControls", ""), with the class name of the SpacePlane module replaced by the (C++) name of the class of data ("PrimaryControls") that is sent over the channel. Likewise, the name of the output channel can be constructed as ("space1", "SpacePlaneY", ""). As you see, in most cases a module knows what data to subscribe to and publish by checking its own name.
ID
Now the name of a module completely identifies the module. However, for everysecond communication in DUECA, sending all these names is a bit cumbersome. Therefore a module (and any other reasonably sized object in DUECA), gets assigned an id. This id consists of two integer numbers, of which the first defines the node in which the module lives. The second number is unique within each node.
Activity and Priority
Now each of the modules in the example has a "main activity", and that is the calculation of its piece of the simulation. As mentioned in the section about Activity, if you want DUECA to do something for you, then you have to create an Activity object. Before we can plunge into the programming, you have to know how DUECA executes these activities, so that you understand the parameters with which activity objects can be tuned.
A characteristic of a real-time program is that the correctness of the program not only depend on the correctness of the output that it generates, but also on the timing of the output. Often different tasks have to be performed, with different timing requirements. Take for example the control loading simulation for the side stick. The IO with the stick hardware and the calculation of the stick properties simulation is done 2000 times per second, every 500 usec. Communication with the other nodes in the DUECA process is done 50 times per second. A communication cycle may take up to 1 msec (1000 usec), with the computer simply waiting for the response from the other computers during most of the time.
If DUECA could do only one thing at a time, either stick simulation or communication with the other nodes, it would not be possible to run the stick simulation 2000 times per second, because once in every forty cycles the communication would "paralyse" the computer for approximately 1000 usec, or two cycles. Therefore DUECA uses multiple threads of execution, and each thread is assigned a different priority. The operating system (if it has real-time capabilities) takes care that the thread with the highest priority is handled first. If there is no work in that thread, the thread with the next highest priority is handled.
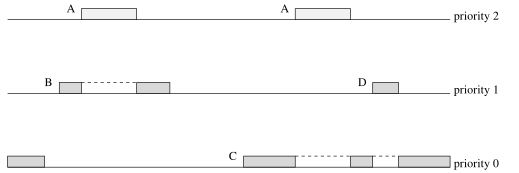
Since DUECA processes may have (much) more modules, and activities for these modules, than there are priorities, activities will have to share a priority, and thereby share a thread. Within one thread, only one activity can be handled at a time, and this activity must be completed before the next activity can be started. So it is also important to know which of the activities that have to be run with a certain priority should be the first to run. To determine that, DUECA also defines an "order" for the activities.
The importance of activities is now summarised in a PrioritySpec, a priority specification, which has two elements:
- priority, which determines the thread in which the activity will run
- order, which determines the importance relative to other activities in this thread. The higher the order, the more important the activity.
Channels and Access Tokens
We already discussed that a channel can only transport one data type, and that we need a special class, which fortunately can be generated easily with the code generator, for the objects that are sent over the channel. In the section on naming, the publish-subscribe mechanism was mentioned, i.e. you need the name of a channel, in the form of character strings, to let DUECA find it for you. Obviously, setting DUECA to work with a description of a channel each time you want to write or read something would not work; the system would spend all its time looking up channels for you. There must be some one-time initialisation for your access to the channel, and from then onwards there must be some "quick" method to read or write data.
This one-time initialisation is implemented in DUECA in the form of access tokens. An access token is your private key to using the channel. You can make access tokens for reading or for writing. When you make the access token, you specify a name for the channel you would like to access, and your module has to supply its own id (so that, if your module doesn't behave, you can be blamed).
Four kinds of access tokens are provided:
- StreamChannelReadToken, for reading data from a stream channel.
- StreamChannelWriteToken, for writing data to a stream channel.
- EventChannelReadToken, for reading an event in an event channel.
- EventChannelWriteToken, for writing an event to an event channel.
You remember the difference between event and stream data, do you? Your module should check the access token to see whether it is valid, and when it is valid the token can be used for sending or receiving data.
First piece of class definition
Now, finally, a first piece of the class definition for the SpacePlane module. First, include the appropriate header files:
What you see here is the inclusion of header files for all commonly used dusime stuff, the access tokens, and for the object types that are sent over the channels. The next part is specific for this module, and that is inclusion of a Simulink real-time workshop header ("simstruc.h"), and the header of the Simulink model, that for some reason has been called "complete".
Now we can declare the spaceplane class, it is derived from the SimulationModule class
You need to do something in your module. In the SpacePlane module, all working code is generated from Simulink with real-time workshop. The SpacePlane model does not have a good landing gear simulation, and the actual landing (after initial touch of the ground) is not of interest for the experiment. So, there has been a stop height defined for the simulation. Now first the variables that the simulation works with are declared.
The simulation can take so-called snapshots. These are complete copies of the state – and you better make sure complete is really complete – which can be stored and later re-used to jump back to a previouse position. Declare the room for temporarily storing these snapshots.
RESULT Whenever a SpacePlane object is created (constructed in c++ parlance), it will have room for the data needed in the simulation.
Then the spaceplane needs access tokens for the channels that it reads from and writes to:
The classes StreamChannelReadToken and StreamChannelWriteToken are templated classes. That means that they have to be "specialized", by supplying a template parameter. In this case the template parameter is the class of data that is sent over the channel.
RESULT The module will have access to a channel with PrimaryControls data, for reading, and one with SpacePlaneY data and another one with SpacePlaneState data, for writing. The names of those channels are determined in the constructor of the SpacePlane class.
For running the simulation, the channels with the controls and the output are all that is needed by the SpacePlane module. However, in the future DUSIME will support implementation of the calculation of trim conditions for the model. The trim conditions, also called initial conditions, are a certain input (stick position) and state that enables you to nicely start flying. These trim conditions are found by trial and error. For example if you want to start flying the spaceplane at a certain altitude and with a certain speed, then the trim condition calculation finds the stick (pitch) position, flight path angle and attitude with which you can start flying without pitching immediately up or down. To support this trial and error process for finding a trim condition, you need a set of event channels that can be used in parallel to the stream channels that are used in the simulation. This is something for later worry, since it is not implemented in DUSIME yet. More is said about the trim condition calculation in section Trim Condition Calculation.
Now, as discussed in the section on Activity Activity, if you want DUECA to call you whenever your model needs updating, you have to create an Activity object. The common kind of Activity object that is used by modules is an ActivityCallback object. Such an object activates a Callback object when the activity must be performed, and this Callback object in turn calls a method of your module. So you need:
- A Callback object to be supplied to each activity that you want to make.
- An ActivityCallback object to embody each of your activities.
RESULT The SpacePlane class now has an Activity. In the constructor it will be specified that the doCalculation function is called for this activity. Whenever the activity has been triggered, and DUECA determines it has time for it (depending on its priority), the doCalculation function is called.
The list of data members we need for the SpacePlane class is almost complete. The only things that are missing are some static members (see the explanation on static members). These are essentially the same for all simulation modules.
Summarising, in a class you need:
-
Access tokens for the data you read and the data you write. In addition to the (stream) access tokens for the normal simulation calculation, you usually need event access tokens for the initial condition calculation.
-
Of course, the necessary data for your simulation. If your DUSIME module encapsulates model state (e.g. a state vector of an airplane, state variables/vectors of subsystems), then this state should be contained within the module class. Do not rely on channels to keep your state variables for you, channels are for communication purposes.
-
The data for calculation of trim conditions. DUECA and DUSIME can perform a trim calculation in parallel to a running simulation, and your module has to be up to that. It is not difficult, see the section on trim calculation.
-
A slot for keeping one copy of the state, in case you need to take a snaphot, see the section on snapshots.
-
Callback function objects and ActivityCallback objects, for allocating your activities. Usually two activities are needed, one for the normal simulation and one for initial condition calculation.
Constructor and destructor
The declaration of the constructor for your module class has to have a fixed set of parameters. Here are the constructor and destructor:
The constructor gets a pointer to the Entity of which the module is a part, a C-string with the part name, and a priority specification. A destructor never has parameters.
Let's take a look at the constructor implementation:
Quite a chunk, let's look at this in detail:
The first two lines is just the start of the definition of the constructor. The part after the colon (:), contains the initialisation of the parent classes (just SimulationModule in this case) and the data members. You can see that the SimulationModule parent class needs the entity pointer, the classname (which refers to a static data member, remember), the part name, the initial condition table and as last parameter the size of the state, in bytes. If you don't do any initial condition calculation, just put a NULL pointer there, if you have no state in the module, enter 0 for the size of the state and remove the snapshot loading and taking code.
Then the data for the simulation is initialised:
S is the simstruc pointer for the RTW simulation data. z_stop is the stop altitude for the simulation. Note that, while z_stop is initialised here, it can still be changed, because it is added to the ParameterTable, see below.
Ather this the access tokens are created:
For each access token, one supplies:
- The id of the module, using getId(). getId() is a method of the NamedObject class, an ancestor (actually a great-grandparent) of the SpacePlane class.
- The name of a channel, in the form of the (entity, classname, part) tuple. Use a NameSet object for this.
And then it is time for the magic of activity allocation:
Here cb1 is a callback object. These require a pointer to the object that they will be performing the callback on (the this pointer) and a reference to the member function that they will be calling, SpacePlane::doCalculation is a function defined in the SpacePlane class.
The activity is allocated by creating the activity object do_calc. This again require the id of the module, a name for the activity, a pointer to a callback object, and a specification of the priority of the activity. The name for the activity is used for presenting the activity in log overviews. It does not have to be unique, but it is nicer if it is.
The priority specification that was passed to the constructor is used for the activity of the module, do_calc. The priority specification determines how DUECA handles that activity, a high priority means that an activity is run as soon as possible, a low priority means that it is run when no other more important jobs are handled.
Now let's look at what happens in the constructor body:
This module uses Simulink real-time workshop code. This code may use values for infinite and not-a-number, each module that uses Simulink code should therefore call rt_InitInfAndNaN. The line below that creates a new instance of the model. A standard rhyme of calls has to follow to initialise this model:
The last piece of code really has to do with the activities:
The setTrigger calls specify that the condition for scheduling the activity is triggered by something else, here the arrival of data on the channel for which "controls" is the access token, triggers scheduling of the do_calc activity.
RESULT The SpacePlane's activity is now linked to the channel with PrimaryControls. Whenever new data arrives here, the doCalculation function will be called, so that the SpacePlane can calculate the new output data and send it over the output channels
All this work in the constructor, what else needs to be done? The section of declaration of constructor and destructor listed, besides the aforementioned two, also the function "complete". Here is the implementation of the complete function:
That is right, it does nothing. When a module is added to DUECA's configuration script, first its constructor is called. Then all parameters supplied in the script are fed to the module, and after that the "complete" function is called. In the complete function you can do initialisation that depends on the parameter values that were fed to the module.
The destructor simply deletes the Simulink model:
Further specification of the module
You see that with the fixed number of parameter for the constructor, it is not possible to tailor your module to your wishes, you might for example want to modify the stop altitude for the simulation, z_stop, if you have defined a runway in your experiment that has an altitude differing from zero. To enable you to provide parameters to your module, DUECA offers two different mechanisms:
-
Member function calls, with the MemberCall class. You can make a simple member function for each parameter that you might want to supply to your module. In a "parameter table" for your module class you enter MemberCall objects that define how your module class should be notified of a parameter value.
-
Variable probes, with the VarProbe class. For a number of "simple" variables, such as integers, doubles, floats, strings, etc. you can enter a VarProbe object in the parameter table. Your module will not notice that it it being probed, but the variables reference in a VarProbe can be modified from outside your class. It is "dirtier", certainly trickier, but saves a lot of typing.
In addition, we want to be able to specify the timing for the spaceplane simulation calculation. Therefore we need a TimeSpec object too. Here they all are:
The SpacePlane class is ideal as an example, because it has one VarProbe and two MemberCalls. For the member function calls we of course need member functions in the class declaration:
The first defines a function that takes a reference to a const TimeSpec, and returns a boolean value. The function should return true if the data it gets is acceptable, and false if not.
Its implementation is:
What happens here is that the activity do_calc, i.e. the activity for updating the model state, gets a time specification. For example a time specification (0, 10) will mean that the do_calc activity becomes periodic, and will always be called for times (n*10, (n+1)*10), see the section on periodic activation.
RESULT Instead of reacting to the data as it comes in on the PrimaryControls channel, the SpacePlane activity (with function doCalculation) will be called only when the time specification says it is time for another step. The data on the PrimaryControls channel may come in every step, so be written for (0, 1), (1, 2) etcetera, but the activity follows the increments in the TimeSpec. You may use this to step down in update frequency, or to step up, so the activity is called more often than the writing on the channel.
The checkTiming function is a "standard" one for many modules. It implements a check on activation and completion times:
RESULT The checkTiming function installs a TimingCheck on the activity. The TimingCheck will compare start and stop times of the activity with the real-time clock, and send reports to a DUECA's TimingView module (assuming you have created one of those in the dueca.mod script). You can use this to see how your simulation performs timing-wise.
The variable that will be probed directly is the altitude for stopping the simulation, z_stop. Here is the parameter table for the SpacePlane module:
A parameter table is an array containing ParameterTable struct objects. Each ParameterTable object has a string and a pointer to a GenericVarIO object, which may be a MemberCall or VarProbe. The parameter table has to be closed off with a ParameterTable object filled with two NULL pointers. The strings will be the commands that can be used in the model script file to specify parameters for the module.
The MemberCall and VarProbe classes are templated classes, each taking two template parameters, the module class and the type of the object that is passed in the call, or modified. Only a limited set of classes may be specified for this second template parameters, check the documentation for the MemberCall and VarProbe.
RESULT Now the stop height can be specified from the script in dueca.mod, by adding " 'set-stop-height 10.0 " (or some other value) to the make-module call. Likewise, the timing and a check on the timing can be specified in the script
Interfacing with the Entity
When a DUECA or DUSIME module is created from a model creation script, first the module's constructor is called, and then, using MemberCall and VarProbe objects, the module is fed with the parameters specified in the creation script. Then the "complete" method is called. For the access to the channels, the module has to wait until DUECA has told (by making the access token objects "valid) that the channels are OK. So after the call to the constructor returns, it is not guaranteed that a module is ready to participate in a simulation or another calculation. To check readiness, and to give modules the opportunity to preform additional initialisation, the Entity to which the module belongs will call the module's "isPrepared" method. Here is the declaration: \dontinclude SpacePlane.hxx \skip cooperation \until stopModule The isPrepared function has to return true when the module is prepared. In the startModule and the stopModule functions, the module has to start and stop its activities. \dontinclude SpacePlane.cxx \skip isPrepared \until e07 For the spaceplane there is no additional calculation in the isPrepared member function. What a module always should do is check whether the access tokens for reading and writing are valid. The isPrepared function should return false when the module is not ready. Since a module can be re-intialised (also with new parameters supplied via the parameter table), the isPrepared() function can be called multiple times. As a module creator you should take this into account. \b RESULT <em> The isPrepared function will be called at start-up. As long as it does not return true, DUECA will refuse to start your module, check this in the interface. With the startModule and stopModule calls, all modules will be started and stopped synchronously. </em> @section quick_work The work itself Now, I think you will agree that it is about time for getting down to business, and describe how the real work is done by the module. All previous declarations and implementation was just for administration, getting access to channels, defining activities and enabling configuration of your module via parameters in the module script. Now we get to the actual work done by the SpacePlane module. There are two basic jobs to be distinguished: <ul> <li> Calculation of the space plane simulation <li> Calculation of a trim condition (which we leave out for now) </ul> Let us start with the simulation itself. We have seen in the section about \ref quick_constructor "the constructor" that there is a member function doCalculation that is called whenever the activity do_calc is invoked. The declaration of this member function is: \dontinclude SpacePlane.hxx \skip s03 \until doCalculation It is called with a \ref key_timespec "time specification". This time specification defines the time for which the calculation has to be done. For example, a time specification ts=(1000,1010), with a value for the time granule of 0.01 s, means that the calculation has to be done for the model time 10 s to 10.1 s. Here is the implementation: \dontinclude SpacePlane.cxx \skip s07 \until e09 Quite a bit of code, I must admit, and it is not purely model calculations, also some administration code. DUSIME will facilitate the implementation of a simulation that can start and stop on command, take "snapshots" of the model state, return to these snapshots, trim a model and start from the trimmed state. Now, not to save work on the part of DUSIME, but in order to obtain a more powerful and flexible system, the modules have to cooperate in this. The main activity of a module (as implemented here by the doCalculation function), has to be able to do the following: <ul> <li> In the HoldCurrent mode, the module must keep the current simulation state. The output that the module is producing must be repeated. <li> In the Advance or Replay mode, the module must make an update of the simulation state, and produce the output. <li> Make a snapshot (= a complete copy) of the model state. Making a snapshot can be requested both when in HoldCurrent or Advance mode. </ul> Now we will discuss this code bit by bit: \dontinclude SpacePlane.cxx \skip s07 \until getAndCheckState The getAndCheckState member function is a function implemented by the SimulationModule parent class. The SimulationModule code keeps up with DUSIME commands that request changes in simulation state. This function has to be called at least once <em> every time </em> the main activity is invoked. It returns one of the three possible states of a simulation, Advance, Replay and HoldCurrent. The first piece of code handles the HoldCurrent case. \until e08a What a simulation should do in HoldCurrent, is repeat the output of the last time. Remember that the SpacePlane module is triggered on the input on the channel with PrimaryControls. Likewise, other modules can be triggered on the channels that the SpacePlane produces. For that to work, the SpacePlane must \em always produce output, so also in HoldCurrent. This piece of code simply reads the output and the state from the Simulink model, and sends it over the output channels. \b RESULT <em> Previous output is repeated over the output channels, giving modules that trigger on those channels a chance to be activated. </em> The next piece of code is called in the Replay and Advance modes, reads the data from the input channel and feeds it to the Simulink model. \until stick_roll To get access to a stream channel, you construct a StreamReader object. Construction of this object needs the access token for the channel, and the time specification with which doCalculation was called, so you get the right data. The simulink model can be queried for a pointer to the input data with the ssGetU() function. Then the data is copied from the PrimaryControls object to the Simulink input vector. The following piece of code calculates the output of the RTW/Simulink model, accesses the output channel, and copies the output of the Simulink model to the SpacePlaneY object in the output channel and the state output channel, using StreamWriter objects. \until s08a Because the space plane showed really strange behaviour when the speed becomes slower and slower (and the subjects in the experiment don't like that, it is better to have no roll-out on the runway than to have a roll-out that you cannot control), a quick hack was inserted to stop the updating of the model when the spaceplane has landed, that is why there is a test for the altitude of the model in the next piece of code: \until s08b The call to MdlUpdate does discrete updates of the model, and it has to be called NSAMPLE_TIMES times. For this model that is two times, one for the continuous time update, and the second for a discrete time update. \b RESULT <em> In these modes, the state of the SpacePlane model is updated, and results (state and output) are sent over their respective channels. </em> Now, if a snapshot is requested, a copy of the model state must be kept for storage. The RTW model is not very large, so we can simply make a copy of the state. This copy is stored in the s_x vector (a data member of the SpacePlane class), and it will be sent later by the sendSnapshot routine. \until e09 The snapshotNow() function is a function of the SimulationModule class, and returns true when a snapshot has to be sent. @section quick_snap Snapshot DUECA uses multi-threading, to have several activities run in parallel. A (time-)critical activity, such as the updating of the space plane model state, must run at a high priority. Activities that are less time-critical should run at lower priorities. An example of these activities is the calculation of a trim condition, another example is the sending of a snapshot. By using multi-threading, DUECA can interrupt a slower, less-important calculation in the middle of processing, and dedicate itself to more time-pressing matters. Now it might seem that sending the snapshot directly from the doCalculation routine is a bit unlikely to be a problem for the real-time calculation, and if you thought that, you are absolutely right. The 20 or so double precision values that have to be copied and sent are not of any real influence on the cycle time of the model. However, we must keep an eye out for the future, and if you happen to develop a model with a megabyte of state data, then copying and sending the snapshot is not a small task. Therefore the function that sends off the snapshots is independent of the model calculations and it is run at a low priority, so that it won't interfere with the model calculations. Here is its declaration, and the declaration of its counterpart, loadSnapshot: \dontinclude SpacePlane.hxx \skip DUSIME \until loadSnapshot The fillSnapshot and loadSnapshot functions are re-implementations of a virtual prototype defined in the SimulationModule class (meaning that, when calling the fillSnapshot from the SimulationModule class, the function that is called will be the re-implementation given here in the SpacePlane class). Here is the implementation of the fillSnapshot function: \dontinclude SpacePlane.cxx \skip e07 \until s07 As you can see, the fillSnapshot has to fill a snapshot object with the appropriate data, and it takes three parameters as argument, a time specification, a snapshot object and a boolean flag, "from_trim". If from_trim is true, then the snapshot must be taken of the state of the model produced in the calculation for a trim condition, if it is false, it needs the state from a running simulation. Looking back at the description of the routine that does the \ref quick_work "model calculation", you can see that the snapshot data was already copied there to a member variable of the SpacePlane class. This data has to be sent with the fillSnapshot function. %Snapshot objects have a variable size, and the object you get has been sized up to the snapshot size that you specified in the SimulationModule call. It contains a buffer in which a module may pack any data it sees fit, and the snapshot object is automatically tagged with the module's full name. At the start of the function, an amorphous storage object, which can pack almost anything into an array of bytes, is created. With packData calls, the data can be inserted into the AmorphStore object, which actually packs the data (in a computer hardware independent fashion) into the %Snapshot object's buffer. The loadSnapshot does the reverse, it takes a Snapshot, makes an AmorphReStore object from the Snapshots filled buffer, and pulls data from that object to fill the Simulink model's state @section quick_trim Trimming the model This is not implemented yet. Bummer! @section quick_finish Connection to the scripting language Now, in the above you have seen how a module class is written, now all that is missing is the means to use it within DUECA/DUSIME. The generally advised method for setting up a simulation – and the only method you can get any support for – is by means of a model creation script. This script, written in scheme, is interpreted by DUECA to create all modules and entities in a complete DUECA process. To make your module callable/creatable from scheme, you have to make one TypeCreator object, and the usual way to do this is by creating a static variable in your module implementation file: \dontinclude SpacePlane.cxx \skip s10 \until TypeCreator<SpacePlane> The classname will now be the name under which the SpacePlane module is known in scheme, and the parameters from the parameter table can be supplied in the scheme script to tailor or change the space plane module. \b RESULT <em> The TypeCreator object is "static", and that means that it will be made when the dueca program is started. The TypeCreator tells the Scheme interface code that a new type of module can be created, what it is called and what the parameter table is. Its name is not important, the only thing that is important is that there has to be (exactly!) one TypeCreator per new module type.